

About
 Q450 (450mm) size multirotor platform is a commonly most adopted choice for custom build FPV multirotor among all r/c flying enthusiast. Majority of popular hand picked motor, electronics and FPV equipment fits best on 450mm size platform especially a minimal fit for Go-Pro HD camera owner. Its also the most popular must have platform
Q450 (450mm) size multirotor platform is a commonly most adopted choice for custom build FPV multirotor among all r/c flying enthusiast. Majority of popular hand picked motor, electronics and FPV equipment fits best on 450mm size platform especially a minimal fit for Go-Pro HD camera owner. Its also the most popular must have platform  on-line and its cheaper to start priced raging from $16~$27 USD per-kit. The original kit was known as "DJI 450 Flamewheel" but clones version swamped the market to make it more affordable to budget multirotor builder since most flying involve constant crashes which required cheaper and instant parts replacement. Build mostly from fiberglass platform plated with copper for power distribution, composite plastic rotor arms and handful of allen bolts to bind the assembly giving average 280 gram weight per-frame without motor and electronic hardware. Building a simple basic non-FPV normal VLOS flight can be difficulty for beginner without basic R/C experience since most of the difficulty comes from tuning the flight controller board gyro PID setup. While getting the right motor to mix match with propeller and ESC placed in second.
on-line and its cheaper to start priced raging from $16~$27 USD per-kit. The original kit was known as "DJI 450 Flamewheel" but clones version swamped the market to make it more affordable to budget multirotor builder since most flying involve constant crashes which required cheaper and instant parts replacement. Build mostly from fiberglass platform plated with copper for power distribution, composite plastic rotor arms and handful of allen bolts to bind the assembly giving average 280 gram weight per-frame without motor and electronic hardware. Building a simple basic non-FPV normal VLOS flight can be difficulty for beginner without basic R/C experience since most of the difficulty comes from tuning the flight controller board gyro PID setup. While getting the right motor to mix match with propeller and ESC placed in second.
 Model specification & setup
Model specification & setup
Airframe type: multirotor - quadcopter
Branding/Manufacturer: DJI, Hobby King, cloned
Model name variant: 450 Flamewheel, Q450
Material build: Plastic composite + Fiber glass plated with copper circuit printed.
Rotor to rotor: 450mm
Width: 220mm
Height: 55mm
Stock airframe weight: 280gram
Full FPV flying weight (without secondary HD cam): 810gram
Full FPV flying weight (with secondary HD cam): 830gram
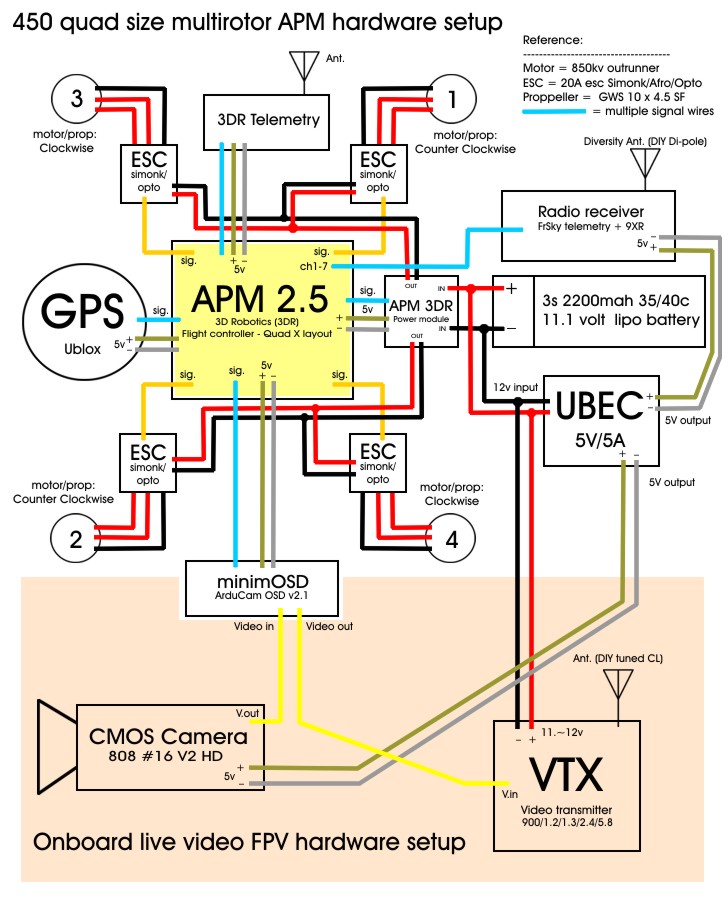
Flight control board: 3DR APM 2.5 (3Drobotics Ardupilot/Arducopter).
ESC: 4x 20A Simonk/AFRO
Motor: 4x 850KV
Proppeller: 4x GWS 10x4.5 SF (2x CC/2x CW)
Radio receiver: Frsky telemetry
Radio receiver antenna: Diversified 2x di-pole
Battery: 2200mah 3s 35c
My DIY FPV specification
Camera: SONY CCD 520TVL 150 deg lens
Secondary camera: 808 #16 V2
Camera pan/tilt mechanism: Not applicable
OSD: MiminOSD ARDUCAM V2
Flight Control board: 3DR APM 2.5 (3Drobotics Ardupilot/Arducopter).
Video transmitter: Boscam video transmitter
Video antenna: DIY tuned CL antenna
Battery: Shared with main.
Building
 Its not difficult to install FPV hardware into this little bug. Just remove all that not necessary needed to keep overall "super lightweight", keep the wires short and thin and solder with little blob to the connection. The FPV hardware are extremely basic: just a nano camera and nano size video transmitter (1.2/2.4/5.8ghz) powered from separate single micro lipo pack 150mah 1s. A good build will give you a perfect total flying weight of below 70 gram. If you're planing to do some aerial video/photography a totally naked/stripped 808 #16 V2 HD key-chain can be stick under the belly with total flying weight of 83 gram. You'll need to be creative to custom made a soft landing gear to handle rough landing. Some thin looped zip ties under the gear cage will do the job to spring dampen any harsh landings.
Its not difficult to install FPV hardware into this little bug. Just remove all that not necessary needed to keep overall "super lightweight", keep the wires short and thin and solder with little blob to the connection. The FPV hardware are extremely basic: just a nano camera and nano size video transmitter (1.2/2.4/5.8ghz) powered from separate single micro lipo pack 150mah 1s. A good build will give you a perfect total flying weight of below 70 gram. If you're planing to do some aerial video/photography a totally naked/stripped 808 #16 V2 HD key-chain can be stick under the belly with total flying weight of 83 gram. You'll need to be creative to custom made a soft landing gear to handle rough landing. Some thin looped zip ties under the gear cage will do the job to spring dampen any harsh landings.
FPV building level difficulty/rating: Medium (6/10)
FPV equipment setup grade: Basic
Building hours required: 5 hours
Skill required: Soldering
Critical issues during installation: Micro/fine soldering
Required additional mods/must do improvement: Propellers balancing if use GWS 5443 DD due to vibration during video recording.

FPV flight characteristic and performance
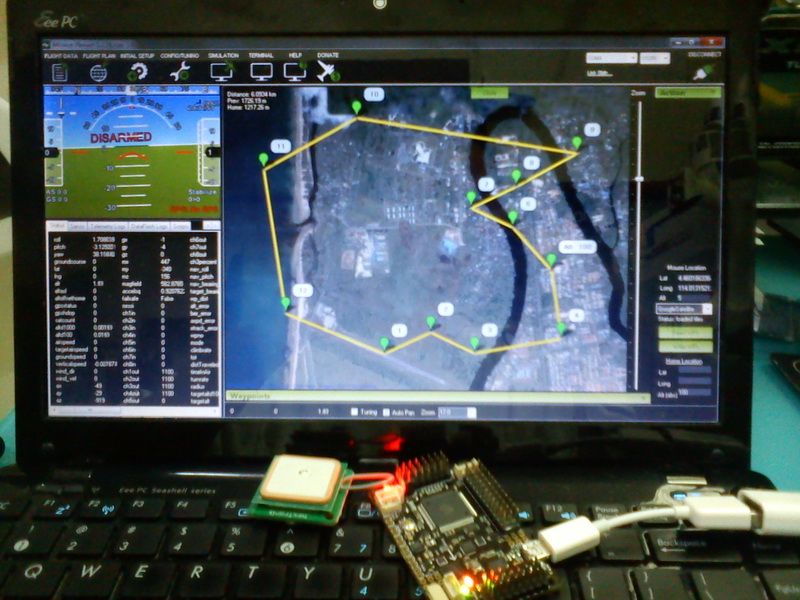
 Basically if you know how to fly a 4ch toy helicopter then flying a Q450 is a walk in the park. The color of the propellers will aide your flying orientation for VLOS flight view/standing point of view. In FPV mode flight with APM 2.5 (Arducopter firmware) flight controller the fl
Basically if you know how to fly a 4ch toy helicopter then flying a Q450 is a walk in the park. The color of the propellers will aide your flying orientation for VLOS flight view/standing point of view. In FPV mode flight with APM 2.5 (Arducopter firmware) flight controller the fl ight was smooth and stabilized fully. It could also "Follow-Me","Loiter", "Level", "Way-point flight", "Acro", "Auto-landing" and "Return Home" (RTH) by itself with less intervention/control from the pilot. Mostly everything is autonomous flight thanks to 3Drobotics Ardupilot/Arducopter Open Sourced flight hardware system that have sensors built-in such as GPS, Barometer, Magnetic Compass and gyros to sense and navigate the environment around. Other added features include able to control via your Android phones/tablet, connect and control via computer joystick/ground station in real-time. I can also customized several advance feature to make autonomous more optimized for several task including camera gimbals panning and activation, servo control per-way-point, sonar and other cool feature on par with advance UAV capability on level of civilian usage. Having to rely on-board hardware for autopilot and flight assisted stabilization to prevent error on the air can be helpful but some advance experience pilot/user may not able to enjoy radical maneuver, stunts or aggressive flying since control are limited to 40% unless "Acro" mode are switched/enable which is not suited for beginner flyer.
ight was smooth and stabilized fully. It could also "Follow-Me","Loiter", "Level", "Way-point flight", "Acro", "Auto-landing" and "Return Home" (RTH) by itself with less intervention/control from the pilot. Mostly everything is autonomous flight thanks to 3Drobotics Ardupilot/Arducopter Open Sourced flight hardware system that have sensors built-in such as GPS, Barometer, Magnetic Compass and gyros to sense and navigate the environment around. Other added features include able to control via your Android phones/tablet, connect and control via computer joystick/ground station in real-time. I can also customized several advance feature to make autonomous more optimized for several task including camera gimbals panning and activation, servo control per-way-point, sonar and other cool feature on par with advance UAV capability on level of civilian usage. Having to rely on-board hardware for autopilot and flight assisted stabilization to prevent error on the air can be helpful but some advance experience pilot/user may not able to enjoy radical maneuver, stunts or aggressive flying since control are limited to 40% unless "Acro" mode are switched/enable which is not suited for beginner flyer.
 Minimum level of flight experience required/flight-hours: Beginner(10 hour)
Minimum level of flight experience required/flight-hours: Beginner(10 hour)
Nature of platform handling experience/skill required: Helicopter
Self leveling capability in thumbs-off stick situation: Yes (Stabilized mode)
Take-off & landing difficulty: Easy
Hand launch: No
Max speed: 55~km/h
Min speed before stall: Not applicable
FPV flight/radius: 500m ~ 1.5km max (given above FPV spec/setup)
Max altitude: -
Bail-out/fail safe recovery altitude limit: 20m
FPV safe distance range for testing: 500~700m (Open field)
High angle of attack (AOA) tolerance limit before stall: Not applicable
Ground "STOL" (Short Take Off and Landing) capability/thrust%: Not applicable
Altitude climbing power/thrust%/AOA angle: Not applicable
360 degree turning radius clearance/holding pattern: Not applicable
360 barrel roll/loop acro flight: Not applicable
Control expo - aileron: 45% (low to high)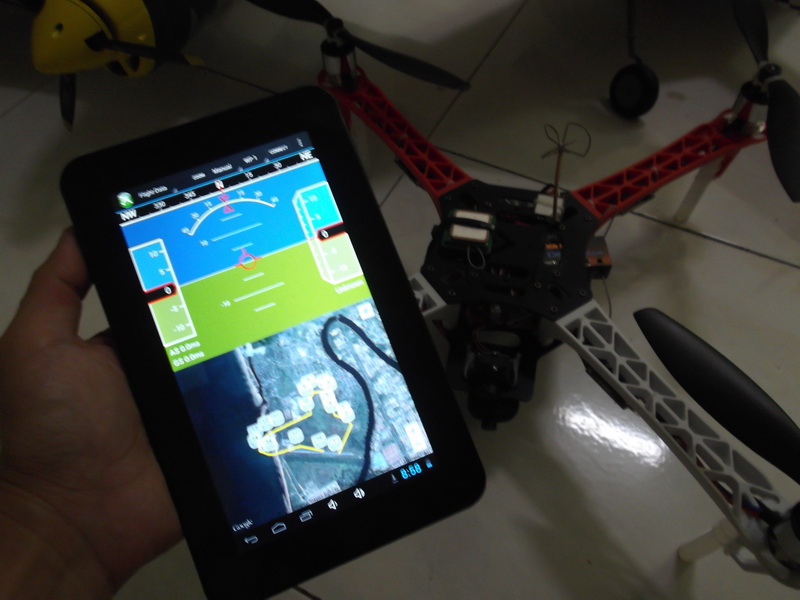 Control expo - elevator: 45% (low to high)
Control expo - elevator: 45% (low to high)
Control expo - rudder: 45% (low to high)
Control end point - aileron: 45% (low to high)
Control end point - elevator: 45% (low to high)
Control end point - rudder: 80% (low to high)
Flight time: 9~12 min
Ground spotter visibility (LOS): 80~100m
Safety issue
A serious FPV multirotor always carry abundant of FPV hardware, stabilization, AP system, video transmitter, telemetry devices, block of metal motor and rigid hard platform, it need huge amount of power supply to sustain ideal flight time and haul heavy payload mainly an expensive camera with the expense danger of increase weight in the air. Increase complexity in the build also increase probability of random failure during the flight, multirotors have lower failure tolerance during flight..if it crash it crash hard like falling bricks unlike fixed wing planes that glides. Beginners should aware before stepping into FPV multirotor ambition. Always think about the risk before jumping all at once.
Pros and Cons
Here are list of pros and cons about this platform. Some of this are needed to take seriously if you are going deep into long term FPV ambition
Pros:
- Able to carry payload such as specialized HD camera and etc with proportional to the airframe size and motor thrust power.
- VTOL flight, able to horizontally take off and land at limited spaces.
- Self stabilizing flight. Optional choice for automated flight such as: Autopilot, Way-point system, Follow-Me and Auto landing allow new comer or beginner r/c pilot to experience model flying without basic r/c experience with additional cost and building knowledge's.
- Commercial value on aerial related opportunity such as aerial ground mapping, photo/videography, farming, surveillance, search and rescue feature easily accessible to the public, company or corporate.
- Blooming multirotor market means more spare parts and services are available.
- Can climb altitude faster than fixed wing platform.
Cons:
- Flying hazard are extremely high: accident due to falling multirotor towards property and living things can inflict extremely high damages because of the inertial weight during falling, rigidity of the airframe and fast sharp spinning propellers.
- Multirotor failure rate is between 40%~70% depending on the build. Custom build multirotor failure usually related to loose propellers collet, overheated/high motor and esc loading, BEC current "Ground Loop" issues or insufficient current (A) into the flight board or over processing the stabilization system especially when eg: Autopilot locked over 13>> satellite during full autonomous flight. Factory ready to fly package usually have failure on GPS LOCK and has no indication to allow user to aware such "no satelite" incident early once in the air before manual flight can be intervene unless OSD/telemetry is supplied for FPV monitoring.
- Multirotor doesn't glide, it falls like a brick. Doesn't have "Auto-rotation" like huge 600 scale helicopter does.
- Multirotor can climb higher altitude in an instant but it take 3x duration to hover down to ground level which is slower yet necessary to keep the propellers spinning to stay minimal floating requirement during descending, this consume more power and will drain faster before it reached the ground.

Current status & flight history
Q450 is fun to fly especially if you like to fly and hover over trees, beaches, rivers, country side terrains, looking for trails or close proximity flight with the limitation of flight time  on your lipo battery capacity. If you need to extend longer flight time bigger capacity battery does help but your quad will be heavier and both handling and performance will be degraded. My Q450 didn't live long enough to lived up to its role and expectation, it didn't satisfied my flying needs as most of its flying role easily filled by other flying platform which is far efficient and safer than my Q450.
on your lipo battery capacity. If you need to extend longer flight time bigger capacity battery does help but your quad will be heavier and both handling and performance will be degraded. My Q450 didn't live long enough to lived up to its role and expectation, it didn't satisfied my flying needs as most of its flying role easily filled by other flying platform which is far efficient and safer than my Q450.
Here is the list why Q450 isn't as efficient in its role for my hobby:
- Q450 can hover high and take cool video/photos however a 81gram mini V929 does the same task, even better around cities, park, trees, indoors, corridors, narrow cranny and nooks. I can even catch it with my bare hands.
- Q450 can fly further 1.5km surveying trails, path and locate low altitude objects in 15 minutes however Drifter Ultralight does the same thing with 35 minutes to spare at slow steady pace with extra miles takes a good photo and video....it does "Selfie" cam too.
- Q450 freaks "joe public" while a small silent toy V929 doesn't.

- Q450 is not legally able to fly around city and public, huge grass cutter props with 830gram is a chainsaw. V929 does the job well for being a Stealth Ninja and very joe public friendly.
- Q450 is at minimum 830gram. Pretty heavy among all my active FPV fleet even it uses the same battery lipo capacity like others but can't cover overall distance and flight time. Not as aerobatic or stunts as other models too.
- Q450 fun to zig zag around trees can be easily outrun by HK TRISTANIA and V929 model of similar FPV capability.
- Q450 helps cut grasses and weeds but self explanatory hazard there.
Lifespan operation: 5 months
Maintenance priority check: Motor mounting, props collets, bolts and connectors
Constant critical issue: Vibration
Maintenance cost per-lifespan: None
Flight hours accumulated per-lifespan: 40 hours
Best L.O.S distance record: 1.5 km
Est. distance covered per-lifespan: 398km (Odo)
Best height record: -
Best flight time record per-session: 15min (2200mah 3s 35c)
Activity status: Retired (updated 12 Oct 2014: pending transfer APM flight controller to smaller 200/250 size platform)
Summary
 Q450 wasn't my big cup of Hot chocolate i think i wasted my time and money on this one, probaby because my demographic, location and FPV role doesn't seem to quite to fit the bill. If you are looking forward for aerial photo/videography or just planning to have just 1 or 2 FPV platform in your collection and cruise around your home, park or ground proximity flight Q450 is for you. But if you're planning to FPV an extra mile and extra run-time to enjoy beyond the horizon Q450 or any multirotors is a bad idea. However it is indeed a good starter platform introduction to VTOL FPV flying or advance autonomous projects specially for beginners and curious people. It does offer multiple of aerial task you can do locally but the performance limitation is always there unless you are willing to spend more money to squeeze out more juice. Weight issue and risk of failure is high if not properly build or handled.
Q450 wasn't my big cup of Hot chocolate i think i wasted my time and money on this one, probaby because my demographic, location and FPV role doesn't seem to quite to fit the bill. If you are looking forward for aerial photo/videography or just planning to have just 1 or 2 FPV platform in your collection and cruise around your home, park or ground proximity flight Q450 is for you. But if you're planning to FPV an extra mile and extra run-time to enjoy beyond the horizon Q450 or any multirotors is a bad idea. However it is indeed a good starter platform introduction to VTOL FPV flying or advance autonomous projects specially for beginners and curious people. It does offer multiple of aerial task you can do locally but the performance limitation is always there unless you are willing to spend more money to squeeze out more juice. Weight issue and risk of failure is high if not properly build or handled.
Videos/Medias![]() Here are some of my video and gallery related to the above topics:
Here are some of my video and gallery related to the above topics:
- Gallery: Q450 quadcopter multirotor - 450mm
- My Youtube channel: 3DXL
- My Videos:
Shopping list

Here i've listed some raw material, hardware and stuff where you can start building your own FPV platform. The list contain the above hardware and also include some compatible ones which you can pickup what suits best for your need and your budget. So come dig around and start your tech flying ambition:
- Platform/Airframe:
- Radio set/combo:
- Flysky TH9x combo (Mode 1)
- Flysky TH9x combo (Mode 2)
- Turnigy 9X combo (Mode 1)
- Turnigy 9X combo (Mode 2)
- FrSKY TARANIS X9D ACCST 2.4ghz transmitter version B
- FrSky DHT 8CH DIY compatible telemetry transmitter module (Advance installation required)
- Frsky V8FR-II 2.4ghz 8ch receiver HV version
- Frsky V8R7-II 2.4ghz 8ch receiver
- Motor/ESC/BEC:
- SS Series ZTW 30A brushless 5V/3A BEC
- 5V external BEC 2s-8s for FPV
- SIMONK 30A 2-3S brushless ESC (Excellent for multirotor)
- HOBBYWING Platinum 30A-PRO ESC OPTO for quadcopter (Popular)
- SIMONK 10A/20A/30A ESC with BEC for r/c aircraft
- XXD HW30 30A brushless ESC
- ZTW Spider Series 20A Opto ESC
- SKY 30A 4 in 1 brushless ESC 2-6S for quadcopter
- HOBBYWING SKYWALKER 25A 4 in 1 brushless ESC (Popular and best choice for quadcopter)
- 5V 12V Adjustable voltage BEC Output ESC distribution connection
- SIMONK 30A 500Hz ESC + HJ2208 1400KV brushless motor combo
- SIMONK 30A 500Hz ESC + HJ2804 1300KV brushless motor combo
- HOBBYWING Eagle 20A brushless ESC
- AUTOQUAD ESC32 30A ESC Closed-loop control system
- HOBBYWING program card for ESC
- KK G657 ESC connecting plate
- E-MAX QUATTRO 25A x4 UBEC multirotor 4in 1 brushless ESC
- T-MOTOR MN2214 920KV brushless motor
- DJI Phantom 2 2212 950KV brushless motor
- E300 2212 920KV brushless motor
- SIMONK 30A + QM2812 980KV brushless motor set for quadcopter
- Camera/HD/DVR:
- SONY EFFIO 1/3 CCD 700TVL aerial camera NTSC (Bulky but excellent high FPS live quality)
- FPV 800TVL mini CMOS NTSC
- 420TVL CCD camera (Best budget FPV camera)
- HORYZON HD full FPV camera (Popular among FPV hardcore use as competitive to Go-Pro)
- Keychain 808 #16 V1 HD camera
- Keychain 808 #16 V3 HD (With live output and HD recording, most popular among r/c and FPV use)
- 1/3 600TVL CMOS NTSC (Best on mini 200 size FPV platform with advantage of generic interchangeable lens)
- 1/3 600TVL CMOS PAL (Best on mini 200 size FPV platform with advantage of generic interchangeable lens)
- FATSHARK 1/3 600TVL CMOS NTSC/PAL (Best on mini 200 size FPV platform with advantage of generic interchangeable lens)
- BOSCAM HD19 Plus Explorer Full 1080p RC Aerial Photography FPV camera
- Mobius 1080p HD (Excellent quality)
- Y3000 720p HD mini (Super lightweight)
- Flight controller/AP System/OSD:
- KK2.1 flight board for multirotor (Most popular and easy to use stabilization system for multirotor)
- KK5.5 flight board for mutirotor
- DJI NAZA-M V2 flight controller with V2 GPS module (Popular choice for plug and fly setup)
- DJI NAZA-M Lite version (Popular budget plug and fly setup)
- DJI NAZA-M V2 GPS + IOSD mini BTU combo
- DJI iOSD mini module NAZA-M compatible
- DJI WooKong-H Lite autopilot stabilization system
- DJI A2 multirotor flight controller (Professional level and expensive too)
- DJI A2 multirotor flight controller + IOSD II (Professional level and expensive too)
- APM 2.5.2 flight board (For advance ARDUINO user)
- APM 2.6 flight board (For advance ARDUINO user)
- APM 2.6 with GPS (For advance ARDUINO user and extended autonomous flight)
- APM 2.6 with GPS + OSD + radio telemetry system (For advance ARDUINO user and extended autonomous flight)
- PIXHAWK 2.3 flight controller ATM32F4 APM PX4 (For advance ARDUINO user and extended autonomous flight)
- RCD 3060/Simple OSD (Super budget)
- CRIUS MWC MultiWii SE V2.5 standard multi-copter flight controller board
- MWC MultiWii SE V3.0 standard multi-copter flight controller board
- MWC 2560 flight controller MultiWii 2.2 MPU6050 deluxe edition
- MWC Mega 3.0 MegapirateNG flight controller (For advance ARDUINO user and most popular for budget open source use)
- HK G-OSDIII with GPS (Budget but not all that accurate gauge)
- Multiwii PRO/MEGA with GPS (For advance ARDUINO user, affordability and extended autonomous flight)
- Video transmitter/combo:
- BOSCAM 2.4ghz 500mw transmitter + receiver (Better obstacle penetration but recomended your radio controller uses other than 2.4ghz to avoid conflict)
- BOSCAM 5.8ghz 200mw transmiter (Basic)
- BOSCAM 5.8Ghz 400w transmitter
- BOSCAM 5.8ghz 8ch receiver
- BOSCAM 5.8Ghz 400w transmitter + receiver combo
- BOSCAM 5.8ghz 600mw transmitter 32ch (Medium range)
- BOSCAM 5.8ghz 600mw transmitter + receiver combo 32ch (Medium range)
- BOSCAM RC305 8ch wireless Audio/Video receiver (Basic requirement for 5.8ghz)
- BOSCAM 5.8ghz 200mw transmitter + receiver combo pack
- BOSCAM AIO FPV video goggle GS920 with receiver 2.4ghz/5.8ghz (Excellent for serious FPV flyer)
- BOSCAM AIO FPV video goggle GS922 with diversified receiver and built-in DVR
- SKYZONE SKY-01 FPV video goggle with receiver 5.8ghz diversity antenna build-in (Excellent for serious FPV flyer)
- SKYZONE SKY-700D FPV 5.8ghz 32ch monitor + DVR (Excellent for starter and complete DVR combo)
- SKYZONE RC702 SKY-702 5.8ghz 7" AIO diversity receiver monitor
- FPV 7" TFT LCD monitor 800x480 screen with audio (Excellent for budget beginner DIY FPV build)
- FATSHARK Predator V2 FPV video goggle complete combo package (Popular choice but only works with FATSHARK video/audio transmitter compatibles)
- FATSHARK Teleporter V3 FPV video goggle complete combo package HD (Popular choice but only works with FATSHARK video/audio transmitter compatibles)
- FATSHARK DOMINATOR FPV video goggle (Excellent for expert/performance DIY FPV system)
- FATSHARK BASE HD (Popular customizable choice but only works with FATSHARK video/audio transmitter compatibles)
- FPV video goggle Monocular Visual high resolution for aerial photography
- Battery:
- YKS 2200mah 3s 25c 11.1v
- High rate 2200mah 3s 25c 11.1v
- High rate 2200mah 3s 35c 11.1v
- WILD SCORPION 2200mah 3s 30c 11.1v
- WILD SCORPION 2200mah 3s 35c 11.1v
- ACE 2200mah 3s 20c 11.1v (Really good performance)
- ACE 2200mah 3s 25c 11.1v (Really good performance)
- ACE 2200mah 3s 30c 11.1v (Really good performance)
- LION POWER 2200mah 3s 25c 11.1v
- LION POWER 2200mah 3s 30c 11.1v
- LION POWER 2200mah 3s 35c 11.1v
- FlowerPower 2700mah 25c 11.1v
Building threads/Referral
 If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me hagging around some popular R/C and FPV forum below.
If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me hagging around some popular R/C and FPV forum below.
- Rcgroups FPV forum
- Rcgroups Multirotor forum
- http://www.rcgroups.com
- http://www.fpvlab.com
- http://www.diydrones.com
- http://www.rcuniverse.com
- http://www.flitetest.com
- http://fpv-forum.com
- http://www.rcexplorer.se
- http://homepages.paradise.net.nz/bhabbott/Servo.html
