

About
 The "Sky Surfer" (@ HK Bixler) is the most popular flying platform especially for beginner pilot both as casual Line of Sight (LOS) and for expert pilot use on FPV/UAV purposes for aerial videography and unmanned S.A.R task. It's very tame in the wind, very docile in handling and also fly gently slow but maneuver like a cow. The wings are hugely broad in size provide huge amount of wing lift and have a dihedral wingtip for self stabilized
The "Sky Surfer" (@ HK Bixler) is the most popular flying platform especially for beginner pilot both as casual Line of Sight (LOS) and for expert pilot use on FPV/UAV purposes for aerial videography and unmanned S.A.R task. It's very tame in the wind, very docile in handling and also fly gently slow but maneuver like a cow. The wings are hugely broad in size provide huge amount of wing lift and have a dihedral wingtip for self stabilized  flight. The obvious impression that comes to anyone mind when you see the shape of this plane that it reminds you of a Dolphin because the rudder, the wing tip and the blunt nose reminds you of one. Made completely from compressed molded EPO foam it is very durable to common beginner's crashes, bashes and easy enough to be repair using a hot glue and hot boiling water treatment to bend it straight to its original shape.
flight. The obvious impression that comes to anyone mind when you see the shape of this plane that it reminds you of a Dolphin because the rudder, the wing tip and the blunt nose reminds you of one. Made completely from compressed molded EPO foam it is very durable to common beginner's crashes, bashes and easy enough to be repair using a hot glue and hot boiling water treatment to bend it straight to its original shape.
The cost also significantly cheap between USD$35~50 price range in ready to fly, ARF or kit form. The interior fuselage has a huge cavity enough to fit in lots of flight hardware which makes it ideal platform to carry FPV/UAV tasks payload especially 720p/1080p HD cameras like Go-Pro.
The Sky Surfer comes in many re-branded manufacturer labels and models names such as Hobby King Bixler, J-power Sky Surfer, Blitz Sy Surfer and etc. Its easy to find one the market place as it is the common favorite plane that sells well for any people who wanted to learn how to fly an R/C plane. If you are so confused to talk what you want with your dealer just say the word "BIXLER".
This is actually my first FPV platform to try out venture into FPV few years back. My choice was this because i follow the crowds and its how the newb FPV trends goes.
Model specification & setup
 Airframe type: Glider
Airframe type: Glider
Branding/Manufacturer: J-power, Blitz, Hobby King and etc..
Model name variant: Sky Surfer, Bixler and etc
Material build: EPO foam
Wingspan: 1400mm
Length: 925mm
Stock airframe weight: 650gram
Full FPV flying weight: 1000~1300gram
Aileron: 2x 9g servo HXT900
Elevator: 1x 9g servo HXT900
Rudder: 1x 9g servo HXT900
ESC: 20~30A
Motor: Stock*
External BEC: UBEC 5V/5A
Proppeller: APC style 6x4/5x5/6x5
Radio receiver: Turnigy 9x 8ch
Radio receiver antenna: Stock Omni
Battery: 1x 2200mah 3s 35c
Center Gravity: 1/3 from the front leading edge of the wing.
My DIY FPV specification
Camera: 520 TVL Sony CCD
Secondary camera: None
Camera pan/tilt mechanism: Foxtech mech + 2x 9g HXT900 (180 degree mods)
OSD: Hobby King G-OSDII with GPS
Flight Control board: None
Video transmitter: Boscam 5.8ghz 200mw
Video antenna: Stock Omni
Battery: Shared with main.
Building
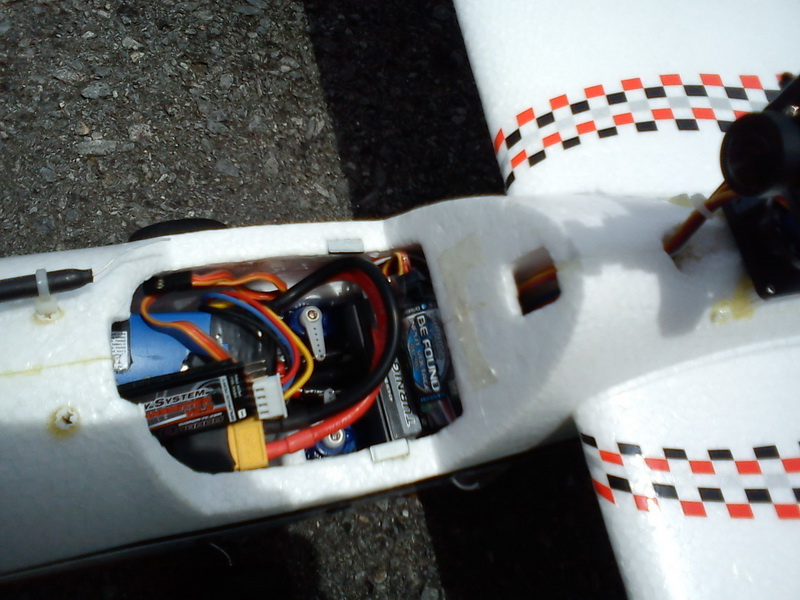 Before installing the FPV equipment it must be flown LOS (Line Of Sight) first to get a proper neutral control trimming. Its not that hard to install the FPV equipment on Sky Surfer, the huge inner cavity fit almost anything while the camera mechanism and video transmitter were located outside. All you need is just plug in where necessary provided you've been reading some guides from several online forum such as Fpvlabs, Rcgroups, Rcuniverse, DIYdrones, Flitetest and etc before you go full gear on FPV. Just be caution to separate critical hardware such as receiver and video transmitter away from RF interference such as SBEC
Before installing the FPV equipment it must be flown LOS (Line Of Sight) first to get a proper neutral control trimming. Its not that hard to install the FPV equipment on Sky Surfer, the huge inner cavity fit almost anything while the camera mechanism and video transmitter were located outside. All you need is just plug in where necessary provided you've been reading some guides from several online forum such as Fpvlabs, Rcgroups, Rcuniverse, DIYdrones, Flitetest and etc before you go full gear on FPV. Just be caution to separate critical hardware such as receiver and video transmitter away from RF interference such as SBEC 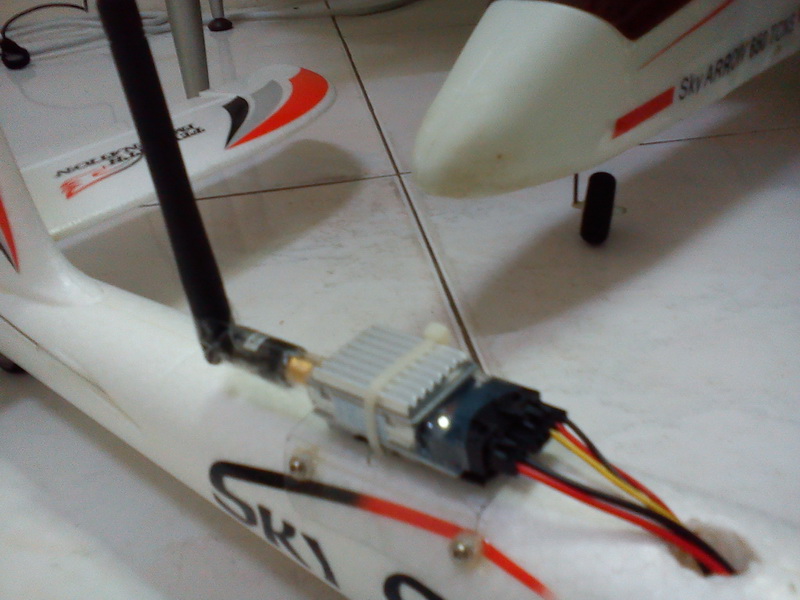 and CCD camera wires because wires do emit slight RF interference that could offset/decline your signal momentarily up in the air, usinbg ferrite magnet should solve some problems. Running on 6x servo (6x 550mA current) should match the current supply draw from UBEC 5V/5A to avoid sudden "Brown Out" or dead stick control in the air. Yes, FPV stuff needs lots of math calculation and know how 101 stuff. The stock ESC module that propel the motor are likely to be stock 20~25A but i changed it to 30~40A for extra reliability and extra thrust power to bail out from any problem especially when the airframe exceed 1kg limit. One thing i don't like about setting up inside this airframe that i need bunch of long servo connector, power wires and video wires running quite a length throughout the fuselage which is the reason why there lots of RF emission along the lines that dwarf your signal propagation...the worse thing was i only knew this after 5 years of FPV build, the consequences of ignoring RF stuff is bad for long term usage.
and CCD camera wires because wires do emit slight RF interference that could offset/decline your signal momentarily up in the air, usinbg ferrite magnet should solve some problems. Running on 6x servo (6x 550mA current) should match the current supply draw from UBEC 5V/5A to avoid sudden "Brown Out" or dead stick control in the air. Yes, FPV stuff needs lots of math calculation and know how 101 stuff. The stock ESC module that propel the motor are likely to be stock 20~25A but i changed it to 30~40A for extra reliability and extra thrust power to bail out from any problem especially when the airframe exceed 1kg limit. One thing i don't like about setting up inside this airframe that i need bunch of long servo connector, power wires and video wires running quite a length throughout the fuselage which is the reason why there lots of RF emission along the lines that dwarf your signal propagation...the worse thing was i only knew this after 5 years of FPV build, the consequences of ignoring RF stuff is bad for long term usage.
FPV building level difficulty/rating: Easy (8/10)
FPV equipment setup grade: Intermediate
Building hours required: 10 hours
Skill required: Soldering/Foam cutting
Critical issues during installation: Video antenna/RF placement
Required additional mods/must do improvement: Reinforce/beef up motor mounting else fail after few round of flight.
FPV flight characteristic and performance
 The details below flown and tested using FPV hardware mentioned above. This plane flies stable in any wind condition, very docile and tame under any beginners pilot thumbs (assume i'm flying in 15km/h wind speed head-on). Given at 300~350m altitude at 25~30% throttle will last a good steady 45 minutes worth of flight time.
The details below flown and tested using FPV hardware mentioned above. This plane flies stable in any wind condition, very docile and tame under any beginners pilot thumbs (assume i'm flying in 15km/h wind speed head-on). Given at 300~350m altitude at 25~30% throttle will last a good steady 45 minutes worth of flight time.
Minimum level of flight experience required/flight-hours: Beginner(30 hour)
Nature of platform handling experience/skill required: Glider
Self leveling capability in thumbs-off stick situation: Yes at 12km/h>>
Take-off & landing difficulty: Easy
Hand launch: Yes
Max speed: 50~km/h
Min speed before stall: 5~10km/h
FPV flight/radius: 1.2km max (given above FPV spec/setup)
Max altitude: -
Bail-out/fail safe recovery altitude limit: 200m
FPV safe distance range for testing: 600~700m (Open field)
High angle of attack (AOA) tolerance limit before stall: 30 degree at 15~20km/h
Ground "STOL" (Short Take Off and Landing) capability/thrust%: None
Altitude climbing power/thrust%/AOA angle: 20 sec/per-meter at 60% thrust/15 degree
360 degree turning radius clearance/holding pattern: 20m
360 barrel roll/loop acro flight: fail (hazard)
Control expo - aileron: 45% (low to high)
Control expo - elevator: 45% (low to high)
Control expo - rudder: 45% (low to high)
Control end point - aileron: 100% (low to high)
Control end point - elevator: 100% (low to high)
Control end point - rudder: 100% (low to high)
Flight time: 25~45 min
Ground spotter visibility (LOS): 600~800m
Safety issue
 It is true in the world of model flying bigger are always better and they fly well too because they are not easily being pushed around by heavy winds and ground turbulence however there's a trade off to all this good flying characteristic. Being able to carry payload exceed 1kg can have heavy implication to all the 9 gram control servo on aileron. On ground level zero flight condition where the plane just sit idle around on the table doing nothing where there's no servo servo load or control applied, the servo only consume ranging from between 550mA~750mA peak at almost zero kg-cm for example on HXT900 have temporary 5~10 second torque push at 22.2 oz-in (1.60 kg-cm) when not in the air. The value of current consumption increase when its airborne and its torque efficiency however is lower since each aileron, rudder and elevator is constantly hammered by wind resistant due to the size of its surface control combine with full control exercise from pilot active radio transmission. For example servo at 45 degree "flaps" mix mode will probably get hit around ([1.3kg flight weight /2] + 0.9kg wing force) = 1.55kg of load can only hold on just 10 seconds before it had a control lockout due to overheating servo FET chip or if unfortunate burned due to FET "over-amping" which is common on any 9g servo, worse you can "Brown-Out" all flight control.
It is true in the world of model flying bigger are always better and they fly well too because they are not easily being pushed around by heavy winds and ground turbulence however there's a trade off to all this good flying characteristic. Being able to carry payload exceed 1kg can have heavy implication to all the 9 gram control servo on aileron. On ground level zero flight condition where the plane just sit idle around on the table doing nothing where there's no servo servo load or control applied, the servo only consume ranging from between 550mA~750mA peak at almost zero kg-cm for example on HXT900 have temporary 5~10 second torque push at 22.2 oz-in (1.60 kg-cm) when not in the air. The value of current consumption increase when its airborne and its torque efficiency however is lower since each aileron, rudder and elevator is constantly hammered by wind resistant due to the size of its surface control combine with full control exercise from pilot active radio transmission. For example servo at 45 degree "flaps" mix mode will probably get hit around ([1.3kg flight weight /2] + 0.9kg wing force) = 1.55kg of load can only hold on just 10 seconds before it had a control lockout due to overheating servo FET chip or if unfortunate burned due to FET "over-amping" which is common on any 9g servo, worse you can "Brown-Out" all flight control.
What's a "Brown-out". Well it has something do to with your 5V/5A BEC fail to deliver enough current for your flight operation hence "momentarily empty fuel tank" or one of your equipment consume all the available current leaving no surplus of current for other flight control. Ok lets do some math calculation here about how much current each servo consume, your hardware and etc. Lets declare some variables below, note that all the value are given at approximate nearest number since in the market there are variable of servo choice and other flight hardware ranging from quality and budget. I'm putting somewhere in the middle:
- 9g servo: 750mA (peak control/non-airborne)
- Servo quantity required per-platform + FPV pan/tilt camera: 6x unit
- Radio receiver operating current: 100mA
- Radio receiver operating current: 150mA
- External BEC current rating: 5A or 5000mA (Usually all BEC are commonly 5V/5A)
- BEC heat inefficiently current loss: 100mA (Assume worst case scenario of lousy ventilation or quality)
BEC CURRENT SAFE SURPLUS CALCULATION (non-airborne):
"5" - "3" - "4" - ("2"x"1") - "6" = 150mA The amount you have left as backup to power all the control.... you're not even flying yet.
Looking at the above value you can conclude why a "Flying Wings" platform are more efficient and less prone to "Brown-out" or control lock-out situation because it uses less servo to control all the flight envelop. "Flying Wings" are for pro pilot you you'd better stick to a glider if you are new and be caution with your build. 5V/5A is the best current supply must have module fo any FPV pilot, however don't rock around to much in the air or doing "active" fancy thing in the air if you knew your current supply is on the verge of jumping off the cliff.
Sky Surfer being in EPO foam is a plus benefit to the owner for durability and elastics property upon impact but at the same they do pose hazard when crashed to any ground object combined with inertial weight and altitude. Falling at 100m altitude will probably hit average 35-45km/h falling speed on "Brown-Out" control if the 1.3kg weight are located at good CG spot.
If you do encounter a "Brown-out" situation where all your control are jammed after a hard full speed throttle or you rock all your control too much during the flight which most likely cause your BEC to overheat, do the following step to recover your plane and i assume you are at safe "bail-out" altitude.
- Release all your thumbs from the stick control and throttle it down to sero. Don't worry your plane its going to glide on its own.
- Wait for a few second say between 3~10 seconds, let the BEC cool down.
- **If you are powering your 5V equipment from ESC that have build-in BEC you will need a slightly longer time to cool down, wait until you hear the audible "initialization/start-up beep" similar beep you hear when you plug-in battery on your plane via your on-board video transmitter's microphone.
- Once you feel its the right time to take over the control, pull your elevator and aileron and then start your throttle. However if your plane is "stalling" point the nose downward to gain extra wind speed under the wings before pulling up the elevator.
Brown-out issues is not the only problem you should encounter along your FPV flight, Radio signal loss is very common problem as you wonder too far away from your radio transmitter. Unlike video signal where you can visually experience degraded video quality on screen as first indication of losing signal range, your non-telemetry standard Radio transmitter doesn't indicate that when you are about to loose signal, it will occur random time as you exceed 800m distance. Most advance pilot uses RSSI indicator to indicate percentage lost radio packet before it is completely lockout/disconnected via OSD display but this setup is very costly on your pocket. Well don't worry i have excellent tips for you. The first indication that you are about to loose your radio signal is that you will experience "laggyness" or jittery movement on your camera pan/tilt servo mechanism as you move left and right. If it does make a "U" turn back immediately to your home before its too late.
Pros and Cons
 Here are list of pros and cons about this platform. Some of this are needed to take seriously if you are going deep into long term FPV ambition
Here are list of pros and cons about this platform. Some of this are needed to take seriously if you are going deep into long term FPV ambition
Pros:
- No matter how strong the wind blew it will stay a float and stable like a kite.
- You can hand launch anywhere and land on grassy field on belly landing.
- Huge fuselage cavity fits any FPV hardware of your choice. Heavy duty payload especially mounting a heavy Go-Pro or any HD camera.
- Should any one aileron servo fail the huge wing still able to stabilize horizontally to compensate abnormal roll rate as long you counter back with another functional aileron and rudder.
- Cheaper airframe to start and simple mods.
- Its a "pusher" propeller driven plane, video recording and pilot viewing is not obstructed by spinning propeller unlike "tractor" type propeller infront of the nose.
Cons:
- Aileron servo will fail after several flight at least a 2 week worth of full FPV operation. This is because if the airframe that weighted more than 1kg, the huge aileron is going to be over burden carrying the load plus constant wind turbulence hammering from beneath. This stress escalates more if both aileron to be used as flaps mixing.
- If the plane wing stall into roll barrel recovery is almost impossible, it will spin further more because the "dihedral" wingtip characteristic prohibit immediate roll countering. We call it "Spiral of death" which is common among any dihedral type wings.
- Despite being strong and robust airframe made from durable EPO foam it actually does causes major damages to ground property as it going momentum speed during a dive. High density compressed EPO foam are heavy unlike EPS foam.
- Video signal transmitted on planes best placed when the antenna is LOS (Line Of Sight) with ground receiving antenna but the best place to put on this airframe is at the tail boom where is blocked by blocks of fuselage and "pusher" motor. Putting it under neat the fuselage will be squashed during landing.
- On stock power it is a slow and sluggish altitude climbing platform. You will need to be patient slowly climb to your preferred altitude.
- Stock motor mounting will fail and motor outer case will rubber against the inner motor cowling. Need reinforce moddification to the motor mounting wall.
Current status & flight history
This plane no longer active in my flight roster because i outgrew my skills and prefer more advance piloting, speed and maneuverability needs which is why i go for straight structured wings. Its a large airframe that doesn't met my portability requirement which is quite a struggle to fit into my Sedan size car or when travel abroad, the plus size is probably too hazardous to fly around public parks or above populated minor urban area. I didn't accumulate enough nice video recording nor have any advance hardware to make a flight worth of experience to share with other FPV community since it was just a starter platform. I did have a year worth of good FPV flight experience with this airframe and indeed its a good platform as learning tools. The longer i flew this airframe the more i feel the performance bogged my FPV flying skills, you'll have the feeling that this plane is stubbornly slow and sluggy in any movement as your skills grew further. A year later i move on and left it dusting inside the storage room.
Lifespan operation: 1 year
Maintenance priority check: Aileron servo and flight linkages
Constant critical issue: Aileron servo worn out/jammed due to load stress
Maintenance cost per-lifespan: USD$15 (Servo)
Flight hours accumulated per-lifespan: 192 hours
Best L.O.S distance record: 1.5 km
Est. distance covered per-lifespan: 2,072km (Odo)
Best height record: -
Best flight time record per-session: 55min (2200mah 3s 35C)
Best low hovering speed record: 3km/h
Best record for zero thrust landing distance/power failure glide recovery distance: None
Activity status: Retired (2011)
Reason of retirement: Too big, slow and possible hazard to ground accident as per-weight ratio issue.
Summary
 This is a great plane for beginner to setup their first FPV flight. Robust, stable and easy maintenance access to internal hardware. Huge airframe and wing giving more air time gliding in the wind. However it is a slow flying airframe and heavy at the same time. While other FPV pilot outgrew their use and decided to shift to the next level like me some other experience FPV pilot still using it for long UAV flight (fitted with APM or Feiyu) or for serious aerial videography due to its high carrying and load capacity. Do take note it is a heavy airframe and best to be flown away from public area or away from crowded urban area.
This is a great plane for beginner to setup their first FPV flight. Robust, stable and easy maintenance access to internal hardware. Huge airframe and wing giving more air time gliding in the wind. However it is a slow flying airframe and heavy at the same time. While other FPV pilot outgrew their use and decided to shift to the next level like me some other experience FPV pilot still using it for long UAV flight (fitted with APM or Feiyu) or for serious aerial videography due to its high carrying and load capacity. Do take note it is a heavy airframe and best to be flown away from public area or away from crowded urban area.
Videos/Medias![]() Here are some of my video and gallery related to the above topics:
Here are some of my video and gallery related to the above topics:
- Gallery: Sky Surfer - 1400mm
- My Youtube channel: 3DXL
- My Videos:
Shopping list
Here i've listed some raw material, hardware and stuff where you can start building your own FPV platform. The list contain the above hardware and also include some compatible ones which you can pickup what suits best for your need and your budget. So come dig around and start your tech flying ambition:
- Platform/Airframe:
- J-Power SKY SURFER
- Blitz Rc Works SKY SURFER
- HK Bixler 1.4m
- HK Bixler 1.5m
- SKY WALKER 1900 2014 (Almost related but the setup & fitting are exactly the same if you wanted bigger platform)
- SKY WALKER 1700 2014 (Almost related but the setup & fitting are exactly the same if you wanted bigger platform)
- Radio set/combo:
- Flysky TH9x combo (Mode 1)
- Flysky TH9x combo (Mode 2)
- Turnigy 9X combo (Mode 1)
- Turnigy 9X combo (Mode 2)
- FrSKY TARANIS X9D ACCST 2.4ghz transmitter version B
- FrSky DHT 8CH DIY compatible telemetry transmitter module (Advance installation required)
- Frsky V8FR-II 2.4ghz 8ch receiver HV version
- Frsky V8R7-II 2.4ghz 8ch receiver
- Frsky D4R-II 2.4ghz 8ch ACCST receiver
- Motor/ESC/BEC:
- Servo:
- E-MAX ES08MA analog metal micro servo
- TOWER PRO SG90 micro servo 9g (Most popular among r/c plane builder similar to HXT900 servo)
- TOWER PRO MG995 metal geared micro servo 9g
- TOWER PRO SG90S metal geared micro servo 9g
- E-MAX ES3154 mini
- VWINRC MG90D metal gear servo 9g
- E-MAX ES08MA analog metal gear micro servo
- Camera/HD/DVR:
- SONY EFFIO 1/3 CCD 700TVL aerial camera NTSC (Bulky but excellent high FPS live quality)
- FPV 800TVL mini CMOS NTSC
- 420TVL CCD camera (Best budget FPV camera)
- HORYZON HD full FPV camera (Popular among FPV hardcore use as competitive to Go-Pro)
- Keychain 808 #16 V1 HD camera
- Keychain 808 #16 V3 HD (With live output and HD recording, most popular among r/c and FPV use)
- 1/3 600TVL CMOS NTSC (Best on mini 200 size FPV platform with advantage of generic interchangeable lens)
- 1/3 600TVL CMOS PAL (Best on mini 200 size FPV platform with advantage of generic interchangeable lens)
- FATSHARK 1/3 600TVL CMOS NTSC/PAL (Best on mini 200 size FPV platform with advantage of generic interchangeable lens)
- BOSCAM HD19 Plus Explorer Full 1080p RC Aerial Photography FPV camera
- Mobius 1080p HD (Excellent quality)
- Flight controller/AP System/OSD:
- FEIYU TECH FY 41AP Lite autopilot (Quick Plug N Fly autopilot system)
- REMZIBI OSD v1.79 GPS (Small enough to fit into any plane and give accurate measurement)
- Simple 3-axis flight stabilizer for airplane
- SKYLARK FPV OSD with GPS
- SKYLARK Dianmu OSD with GPS and Barometer
- APM 2.5.2 flight board (For advance ARDUINO user)
- APM 2.6 flight board (For advance ARDUINO user)
- APM 2.6 with GPS (For advance ARDUINO user and extended autonomous flight)
- APM 2.6 with GPS + OSD + radio telemetry system (For advance ARDUINO user and extended autonomous flight)
- PIXHAWK 2.3 flight controller ATM32F4 APM PX4 (For advance ARDUINO user and extended autonomous flight)
- RCD 3060/Simple OSD (Super budget)
- MWC Mega 3.0 MegapirateNG flight controller (For advance ARDUINO user and most popular for budget open source use)
- HK G-OSDIII with GPS (Budget but not all that accurate gauge)
- ARKBIRD OSD/GPS Autopilot system (Excellent for fixed winged)
- ARKBIRD Tiny bakancer/stabilizer controller board for fixed winged plane
- Video transmitter/combo:
- BOSCAM 2.4ghz 500mw transmitter + receiver (Better obstacle penetration but recomended your radio controller uses other than 2.4ghz to avoid conflict)
- BOSCAM 5.8ghz 200mw transmiter (Basic)
- BOSCAM 5.8Ghz 400w transmitter
- BOSCAM 5.8ghz 8ch receiver
- BOSCAM 5.8Ghz 400w transmitter + receiver combo
- BOSCAM 5.8ghz 600mw transmitter 32ch (Medium range)
- BOSCAM 5.8ghz 600mw transmitter + receiver combo 32ch (Medium range)
- BOSCAM RC305 8ch wireless Audio/Video receiver (Basic requirement for 5.8ghz)
- BOSCAM 5.8ghz 200mw transmitter + receiver combo pack
- BOSCAM AIO FPV video goggle GS920 with receiver 2.4ghz/5.8ghz (Excellent for serious FPV flyer)
- BOSCAM AIO FPV video goggle GS922 with diversified receiver and built-in DVR
- SKYZONE SKY-01 FPV video goggle with receiver 5.8ghz diversity antenna build-in (Excellent for serious FPV flyer)
- SKYZONE SKY-700D FPV 5.8ghz 32ch monitor + DVR (Excellent for starter and complete DVR combo)
- SKYZONE RC702 SKY-702 5.8ghz 7" AIO diversity receiver monitor
- FPV 7" TFT LCD monitor 800x480 screen with audio (Excellent for budget beginner DIY FPV build)
- FATSHARK Predator V2 FPV video goggle complete combo package (Popular choice but only works with FATSHARK video/audio transmitter compatibles)
- FATSHARK Teleporter V3 FPV video goggle complete combo package HD (Popular choice but only works with FATSHARK video/audio transmitter compatibles)
- FATSHARK DOMINATOR FPV video goggle (Excellent for expert/performance DIY FPV system)
- FATSHARK BASE HD (Popular customizable choice but only works with FATSHARK video/audio transmitter compatibles)
- Battery:
- YKS 2200mah 3s 25c 11.1v
- High rate 2200mah 3s 25c 11.1v
- High rate 2200mah 3s 35c 11.1v
- WILD SCORPION 2200mah 3s 30c 11.1v
- WILD SCORPION 2200mah 3s 35c 11.1v
- ACE 2200mah 3s 20c 11.1v (Really good performance)
- ACE 2200mah 3s 25c 11.1v (Really good performance)
- ACE 2200mah 3s 30c 11.1v (Really good performance)
- LION POWER 2200mah 3s 25c 11.1v
- LION POWER 2200mah 3s 30c 11.1v
- LION POWER 2200mah 3s 35c 11.1v
- FlowerPower 2700mah 25c 11.1v
Building threads/Referral
 If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me hanging around some popular R/C and FPV forum below.
If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me hanging around some popular R/C and FPV forum below.
- Rcgroups FPV forum
- http://www.rcgroups.com
- http://www.fpvlab.com
- http://www.diydrones.com
- http://www.rcuniverse.com
- http://www.flitetest.com
- http://fpv-forum.com
- http://www.rcexplorer.se
- http://homepages.paradise.net.nz/bhabbott/Servo.html