

About
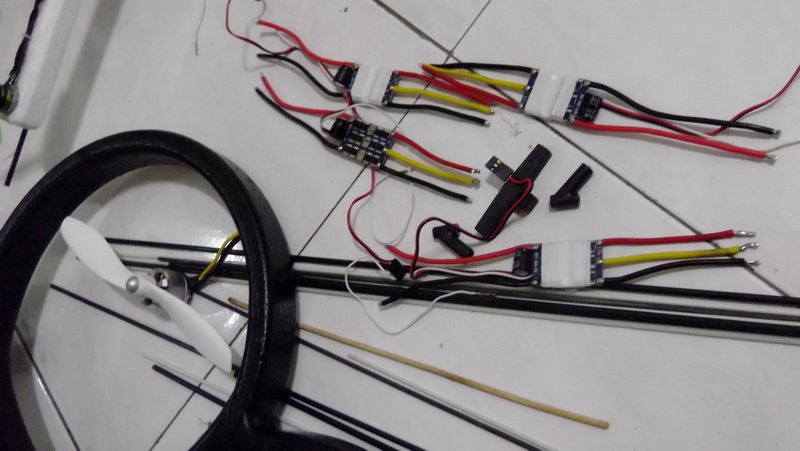
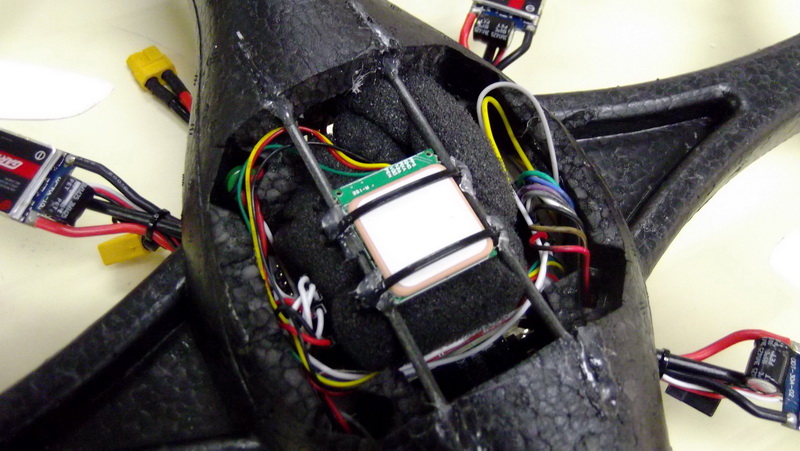
Few weeks after try out my DIY FPV-600 foamy multirotor ends with big success and many flying colors i was so hooked up and wanted to build another foamy FPV multirotor with similar specification thus make use of surplus unused FPV that still linger around my hangar. Keeping my budget below USD$150 in my pocket and randomly approach to various local R/C shop and flying buddies i got myself quite a bargain on a set of second hand parts: MultiWii Pro + GPS  flight controller, a bluetooh module for wireless telemetry connection and a trashed Wl-toys V262/V333/V666 foamy frame sized at 350mm x 350mm rotor to rotor. Non of this build have new parts, mostly are recycled...so i rebuild a duplicated version of FPV-600 electronic connection with extra Bluetooth connectivity with only differences that it uses 350mm quadcopter frame layout, a DJI 920KV brushless motors and 8050 propellers from my old PHANTOM V1.1.1 which fit exactly and nicely inside V262/V333/V666 rotor place holder. Unfortunately PHANTOM V2 propellers spanned at 9"~10" version doesn't fit well. The same carbon spar used to reinforce in the frame of FPV-600 foamy is also used to cross bracing each other to create place holder for 3D printed motor mounting at the same time reinforce the foamy EPO main frame rigidity from being to flex due to increase flying weight. 2 days into the build MultiWii flight controller flashed with MW2.3 firmware with additional modification to the code via ARDUINO sketch and connectivity to smartphone androids apps the EZ-GUI my new "follow me" drone was finally ready for its maiden flight. Due to its rotor to rotor size i called my new multirotor the "FPV-350 @ follow me drone"
flight controller, a bluetooh module for wireless telemetry connection and a trashed Wl-toys V262/V333/V666 foamy frame sized at 350mm x 350mm rotor to rotor. Non of this build have new parts, mostly are recycled...so i rebuild a duplicated version of FPV-600 electronic connection with extra Bluetooth connectivity with only differences that it uses 350mm quadcopter frame layout, a DJI 920KV brushless motors and 8050 propellers from my old PHANTOM V1.1.1 which fit exactly and nicely inside V262/V333/V666 rotor place holder. Unfortunately PHANTOM V2 propellers spanned at 9"~10" version doesn't fit well. The same carbon spar used to reinforce in the frame of FPV-600 foamy is also used to cross bracing each other to create place holder for 3D printed motor mounting at the same time reinforce the foamy EPO main frame rigidity from being to flex due to increase flying weight. 2 days into the build MultiWii flight controller flashed with MW2.3 firmware with additional modification to the code via ARDUINO sketch and connectivity to smartphone androids apps the EZ-GUI my new "follow me" drone was finally ready for its maiden flight. Due to its rotor to rotor size i called my new multirotor the "FPV-350 @ follow me drone"

First day of flight was bunch of task tuning PID, FPV test flight ranging between 800~1000m distance, wind test, GPS position holding, autonomous 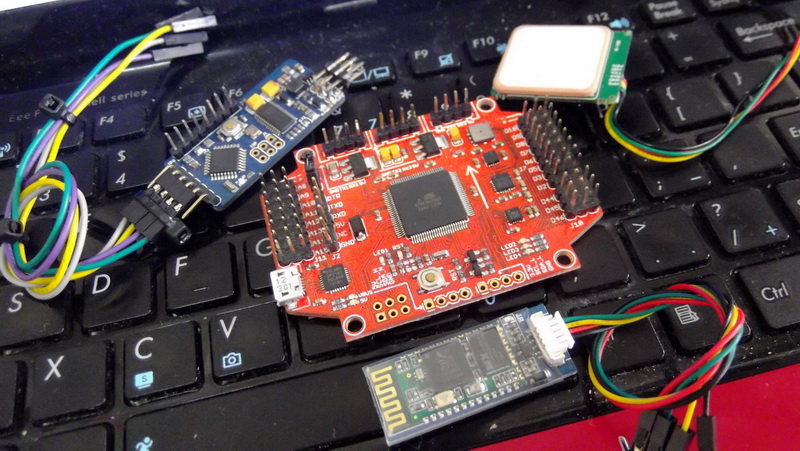 waypoint flight and return home. Only on the second day it was fully tested the "follow me" to see if it could follow me around by recognizing the position of the phone via GPS synchronization....it turns out to be a success after 5 hours worth of fine tuning whole day under the sun..phhheeewww!!!. Margin of accuracy to follow me around was between 65%~90% but being WIP status it can be easily perfected by spending more time outside to fine tune it to perfection. But hey it works great for a cheap community open source UAV technology which its flight core processing power the MultiWii Pro board costs only USD$60~$70 online. FYI my newly build FPV-350 wasn't the first multirotor i made capable of such autonomous flight, years back as documented in my website the APM driven Q450 multirotor was the original gem of autonomous flight because it has better flight controller the 3DR APM2.5 capable of same autonomous flight mode as MultiWii Pro but slightly expensive in cost, more precise GPS positioning and sensors and also better inflight ATMEL processing power. Unfortunately i didn't highlighted the APM Q450 such feature as my previous intention just to build as FPV aerial video/photography platform, being autonomous was only a fail safe feature back then. Back to our present time the FPV-350 project will be touching more on many autonomous experimentation than just FPV flight on MultiWii Pro build.
waypoint flight and return home. Only on the second day it was fully tested the "follow me" to see if it could follow me around by recognizing the position of the phone via GPS synchronization....it turns out to be a success after 5 hours worth of fine tuning whole day under the sun..phhheeewww!!!. Margin of accuracy to follow me around was between 65%~90% but being WIP status it can be easily perfected by spending more time outside to fine tune it to perfection. But hey it works great for a cheap community open source UAV technology which its flight core processing power the MultiWii Pro board costs only USD$60~$70 online. FYI my newly build FPV-350 wasn't the first multirotor i made capable of such autonomous flight, years back as documented in my website the APM driven Q450 multirotor was the original gem of autonomous flight because it has better flight controller the 3DR APM2.5 capable of same autonomous flight mode as MultiWii Pro but slightly expensive in cost, more precise GPS positioning and sensors and also better inflight ATMEL processing power. Unfortunately i didn't highlighted the APM Q450 such feature as my previous intention just to build as FPV aerial video/photography platform, being autonomous was only a fail safe feature back then. Back to our present time the FPV-350 project will be touching more on many autonomous experimentation than just FPV flight on MultiWii Pro build.

Below are some highlights of the FPV-350 project:
-
 AUTONOMOUS FLIGHT SYSTEM
AUTONOMOUS FLIGHT SYSTEM
The core heart of my FPV-350 was a flight controller processors: MULTIWII PRO + GPS. It offer various of autonomous flight modes thanks to open source codes (ARDUINO) built by online community that offer continuous firmware improvement and offer many exciting function not seen even on expensive FPV multirotors. Having wireless connectivity such as Bluetooth or LRS add-on module such as 3DR 433/933 open who new level of flight connectivity through your smartphones and enables "Follow Me" features which open up many practical application such as "Selfies", adventure camera or totaly your personal drone bodyguard. -
STURDY AND IMPACT RESISTANT MULTIROTOR
I was lucky to stumble this cheap quadcopter frame made (V929/V333/V666) out of sturdy EPO foam that fits my FPV-350 project. Comes with component enclosure and propellers guards this allow the multirotor to fly safely without slicing or tearing any living and non-living object on its surrounding that i bumps on. Being made out foam both object comes to impact will have minimal damages or injury. -
 CLOSE AND PERSONAL
CLOSE AND PERSONAL
Like i said before, added full personal connectivity using smartphone and "follow me" feature plus fully enclose foam frame it can roam among the public/crowds and interacting close with others without causing injury and harm from rotor blades. I have an incident where my quad overshoot "follow me" mode and hit me a my back thanksfully the foam proppeller guards keeps the rotor at bay. Its feels like being hit by a soft pillow...good build. -
EXCELLENT RADIO PENETRATION RANGE
Just like its earlier sibling the FPV600 which is made out of foam it has better radio penetration range both control transmission and video/audio. Unlike commercial multirotor frame of today that are build using sturdy nylon plastic, fiber glassed, carbon fibers and rigid metal the home build low density foam frame is excellent material for long range flight because radio transmission between radio receiver/transmitter to ground are not obstructed by dense object such as rotor arm or main frame, instead it able to penetrate through soft foam allow straight solid line of sight video/audio communication and radio control between pilot on the ground and the model itself in the air. The foam material doesn't completely deteriorate or block the radio frequency which is a huge plus.
Model specification & setup
Airframe type: Quadcopter 350mm (WL-TOYS V262/V333/V666 foam airframe)
Branding/Manufacturer: DIY V262/V333/V666 airframe
Model name variant: FPV350
Material build: High density durable EPO foam
Rotor to rotor width: 350mm x 350mm
Flying weight: 760~gram
Flight control board: MultiWii Pro + GPS + Bluetooth module
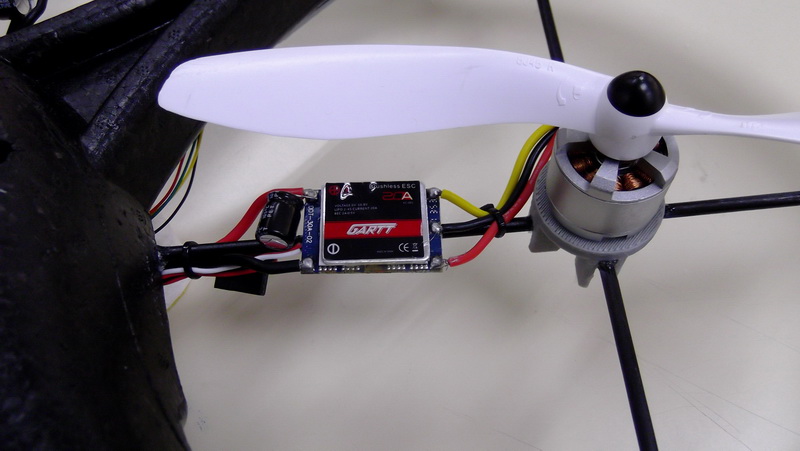
ESC: GARTT 20A with 5V/1A internal BEC
Motors: DJI 920KV brushless
Propellers: DJI self-locking 8045
Radio receiver: FrSky 2.4ghz telemetry type with diversified antenna.
Main battery: 2200~2700mah 3s 35c~45c
My DIY FPV specification.
Below are list of hardware needed for my FPV specification:
- Camera (First build): RUNCAM HD FPV camera.
- OSD: MinimOSD flashed with KVOSD firmware to match MultiWii protocol.
- External BEC: HK mini 5A/5V UBEC to power flight controller board, camera and radio receiver.
- Video transmitter: 5.8ghz 200mw SKYZONE 32ch mini video transmitter 7~12v
- Video antenna: DIY tuned CL antenna
- Battery: Shared with main.
 |
 |
 |
 |
Building
I don't want to repeat myself, the concept of building this FPV-350 is very similar to FPV-600 from previous page (go flip around to FPV600 documentation) except with upgraded size brushless motors, propellers, ESC and additional Bluetooth module as depicted on the schematics below. The build is screw-less i just use hot glue to embed parts into the foam. Foam and hot glue are best friends. Oh btw i 3D printed design my custom motor mounting for DJI 920KV motor to fit on cross braced carbon spar within the frame rotor compartment void.
FPV building level difficulty/rating: Advance (6/10)
FPV equipment setup grade: Advance
Building hours required: 24 hours
Skill required: Soldering and know hot to use hot glue for foam frame assembly
Critical issues during installation: Flight controller PID tuning.
Required additional mods/must do improvement: Wire and weight trimming


FPV flight characteristic and performance
If you watched the video below don't judge to early yet as it was still "Work In Progress" as the wobble effect and uneven level was a rough setting  just to get it fly quickly and tinkering new ideas. The highlight of the flight was 'autonomous' flight mode such as "follow me" and also some others to come (i'll update some more video soon). Not much of full range high altitude FPV flight because i got tired of it and been there done that things. So having FPV-350 is about tinkering new ways to enjoy multirotor not only being as FPV high sky aerial platform but also getting it have robotic flight characteristic that have interest human companionship useful in "Selfie" camera shots or as trusty bodyguard in the air. Arm myself with my android smartphone via EZ-GUI apps i can command lots of autonomous flight modes on FPV-350 provided it has all its GPS and sensors calibrated and lock in with the environment. Just a few days flying and toying around with it i had so much pleasure and enjoying knowing that i know have pet animal like characteristic that like to follow me around and entertain public/audience of its robotic like capability. I have a Puppy drone!
just to get it fly quickly and tinkering new ideas. The highlight of the flight was 'autonomous' flight mode such as "follow me" and also some others to come (i'll update some more video soon). Not much of full range high altitude FPV flight because i got tired of it and been there done that things. So having FPV-350 is about tinkering new ways to enjoy multirotor not only being as FPV high sky aerial platform but also getting it have robotic flight characteristic that have interest human companionship useful in "Selfie" camera shots or as trusty bodyguard in the air. Arm myself with my android smartphone via EZ-GUI apps i can command lots of autonomous flight modes on FPV-350 provided it has all its GPS and sensors calibrated and lock in with the environment. Just a few days flying and toying around with it i had so much pleasure and enjoying knowing that i know have pet animal like characteristic that like to follow me around and entertain public/audience of its robotic like capability. I have a Puppy drone!
Minimum level of flight experience required/flight-hours: Beginner(5 hour)
Nature of platform handling experience/skill required: Beginners
Self leveling capability in thumbs-off stick situation: Yes
Take-off & landing difficulty: Easy
Take-off weight: <780g~800g
Hand launch: yup why not it works great...skills needed.
Max tilt angle: 43 degree.
Bail-out/fail safe recovery altitude limit: -
FPV flight/radius: 1000m ~ 1500m max (given above FPV spec/setup)
FPV safe distance range for testing: 500~800m (Open field)
Flight time: 8~12 min
Ground spotter visibility (LOS): 250~400m
 |
 |
 |
 |

Safety issue
None, for a foamy?..none.
Pros and Cons
Here are list of pros and cons about this platform. Honestly speaking on my own terms i see more Pros rather than Cons....this Cons thing doesn't bother me much. Cons only applies if you don't have the experience or confidences to face it...hey its just a piece of cheap foam and cheap parts.
Pros:
- Frame made out of foam with integrated propeller guards, no one or proper get sliced the ninja way.
- Excellent radio penetration though foam.
- Low risk of crash hazard to property and injury to living things. What do expected for a quad that fully enclosed its hardware and rotors behind a cages of foam.
Cons:
- None....with only 5 days i don't see any problem emerge yet. During early phase of autonomous "follow me" test the quad did clumsily bumped into trees, objects and etc but still able to recover quickly and continue to fly...no one injured yet thanks to enclosed prop guards and stubby bumpy foams.

 |
 |
 |
 |
Current status & flight history
 Just only 5 days into flight the FPV-350 with autonomous feature was a fun factor to play around with. I had so much fun with MultiWii flight controller experimenting and tinker around open source code to enable UAV feature such as customizable autopilot flight, Waypoints, Follow Me, Auto takeoff -landings, Position hold, telemetry/geographical information and connectivity to your favorite handheld android smartphone via EZ-GUI apps which you can download at Google Play store online. The FPV flight performance was excellent compare to my FPV600 build, its has power, speed and torque which is very obvious since it is running from original DJI 920KV brushless motors and 8050 propellers which i gutted out from my PHANTOM V1.1.1.....poor thing was torn apart into temporary retirement...well move on. Because the multirotor was fully enclosed in by piece of foam there's slight resistant when flying in the wind but i say a minor trade off for extra durability and safer build to fly around in the public especially as a drone that follows me around with fast spinning rotors. My FPV350 does attract lots of attention recently on weekends not only it has similar physical looks to PARROT AR-DRONE but also astound by its flight range, stability and also autonomous "Follow Me" feature which appeal to Camera Selfie wanna be. I already publish 3 videos Youtube.com featuring fine tuning WIP on follow me each session which proven that you don't have to spent deep pocket to buy a "Selfie" drone....i just need time to get it fly perfect especially get the PID tune well to match it flying mass and rotor sync so it doesn't wobble much like drunken drone...lol.
Just only 5 days into flight the FPV-350 with autonomous feature was a fun factor to play around with. I had so much fun with MultiWii flight controller experimenting and tinker around open source code to enable UAV feature such as customizable autopilot flight, Waypoints, Follow Me, Auto takeoff -landings, Position hold, telemetry/geographical information and connectivity to your favorite handheld android smartphone via EZ-GUI apps which you can download at Google Play store online. The FPV flight performance was excellent compare to my FPV600 build, its has power, speed and torque which is very obvious since it is running from original DJI 920KV brushless motors and 8050 propellers which i gutted out from my PHANTOM V1.1.1.....poor thing was torn apart into temporary retirement...well move on. Because the multirotor was fully enclosed in by piece of foam there's slight resistant when flying in the wind but i say a minor trade off for extra durability and safer build to fly around in the public especially as a drone that follows me around with fast spinning rotors. My FPV350 does attract lots of attention recently on weekends not only it has similar physical looks to PARROT AR-DRONE but also astound by its flight range, stability and also autonomous "Follow Me" feature which appeal to Camera Selfie wanna be. I already publish 3 videos Youtube.com featuring fine tuning WIP on follow me each session which proven that you don't have to spent deep pocket to buy a "Selfie" drone....i just need time to get it fly perfect especially get the PID tune well to match it flying mass and rotor sync so it doesn't wobble much like drunken drone...lol.
Lifespan operation: 15 hours (updated: 10 June 2015)
Maintenance priority check: None
Constant critical issue: None
Maintenance cost per-lifespan: None
Best L.O.S distance record: 1300m~ (Updated: 19 June 2015)
Est. distance covered per-lifespan: 56km (Odo) (Updated: 19 June 2015)
Best height record: -
Best flight time record per-session: 8~10min (2200mah 3s 40c)
Activity status: Active
 |
 |
 |
 |

Summary
Its all about exploring new capability and wonders of autonomous UAV like drone flight. Looking to thinker the wonders robotic flight than just  normal FPV task, then dive into the world of open source flight and spent more time understanding how things works. The more i understand how it works the more i feel i could make multirotor more artificially fly like intelligent digital creature. I've been working on ARDUINO codes since i got my hands on first open source board the 3DR APM flight controller in the past modifiying codes to get it fly the way i wanted. The year have pass i got myself a cheaper board the MultiWii Pro which spar my interest thanks to my flying buddy who show me not to give up on cheappy multiwii boards.
normal FPV task, then dive into the world of open source flight and spent more time understanding how things works. The more i understand how it works the more i feel i could make multirotor more artificially fly like intelligent digital creature. I've been working on ARDUINO codes since i got my hands on first open source board the 3DR APM flight controller in the past modifiying codes to get it fly the way i wanted. The year have pass i got myself a cheaper board the MultiWii Pro which spar my interest thanks to my flying buddy who show me not to give up on cheappy multiwii boards.
Unfortunately people around me thought it was an out of box low standard PARROT AR DRONE because of its famous radial like prop guarded airframe signature which i assume that the V262/V333/V666 was legal copy of AR DRONE....which makes people think i'm flying a cheap out of box FPV drone...well just ignore it...that's good...its a cheap stuff.
This week been really happy with my newly build 350mm size quad because it offer different kind of flying experience no only to me but to other people around me who witness its capability. Its more interactive and fun little pet to have around rather than flying far and high just being role as aerial video/photography. Follow me like a little puppy, take great shots as i travel around and among the crowds. At current status its still WIP fine tuning its flight accuracy but all i know there is a huge space for improvement and innovation thanks to open source codes made by online community that make this drone capability limitless and ageless.

Videos/Medias![]() Here are some of my video and gallery related to the above topics:
Here are some of my video and gallery related to the above topics:
- Gallery: FPV foamy 350mm "follow me" multirotor - MultiWii Pro
- My Youtube channel: 3DXL
- My videos:

Shopping list
Below i've narrow down several parts that fits nicely on this frame and also choices of advance flight controller based on your level of experience and building creativity. Have to be caution that you'll need to do lots of online reading and research on how to use open source flight controller such as MultiWii and also APM to enable cool autonomous feature such as "follow me", autopilot waypoint flights and etc:
- Main frame:
- Radio set/combo (If you wanted to upgrade radio range/distance):
- Brushless motor:
- ESC (Electronic Speed Controller):
- Propellers:
- Main FPV piloting camera:
- 960H CCD Effio 700TVL Camera Mini Video Camera
- Arkbird 1/3 Sony 960H CCD 700TVL FPV Camera For Aerial Photography
- DC12V 1/3 960H CCD 700TVL 2.8mm Lens Wide Angle Camera for FPV QAV250

- FPV 1/4 CMOS HD Color Camera Module 600TVL 120 Degree Wide Angle
- Aomway HD Mini 1/3'' CMOS 600TVL 2.8mm FPV Camera MOL5P *2.54 Port
- DAL 700TVL FPV HD 1/4'' CMOS Camera Module Wide Angle
- Eachine 700TVL 1/3 Cmos FPV 110 Degree Camera w/32CH Transmission
- Eachine 700TVL 1/3 Cmos FPV 148 Degree Camera w/32CH Transmission
- Main FPV piloting camera with integrated HD recording (video output capable):
- Advance Flight controller/AP System (for advance and autopilot build)
- CRIUS MWC MultiWii SE V2.5 Control Board W/GPS NAV Module Combo
- MultiWii PRO Flight Controller w/MTK GPS Module
- Eachine Mini APM V3.1 Flight Controller With NEO-6M GPS Module
- Mini APM V3.1 Flight Controller With Neo-6M GPS For Multicopters
- Mini APM2.72 Flight Controller with 6M GPS Telemetry OSD Power Board
- MWC Multiwii Bluetooth Parameter Debugging Programmer Module
- Apm2.5/2.6/2.8 Pixhawk PIX 2.43 Bluetooth Module Bluetooth Data Link
- OSD module (On Screen Display):
- BEC:
- Video transmitter/combo:
- Skyzone TS5823 5.8G 200mW 32CH AV Transmitter Module
- Boscam TS586 FPV 5.8G 600mW 32CH AV Wireless Transmission Transmitter
- Boscam FT953 5.8G 400mw 32CH Mini FPV AV Transmitter
- Boscam FPV 32CH 5.8G 350mW Wireless Transmitter AV Transmission Black
- Boscam FPV 32CH 5.8G 600mW Wireless Transmitter And RC905 RX Receiver
- Boscam FPV 32CH 5.8G 350mW Wireless Transmitter And RC905 RX Receiver
- Video receiver/video goggle/LCD combo:
- Boscam FPV 5.8G 32CH Wireless AV Receiver RC832
- FPV 7inch TFT-LCD Monitor HD 800x480 Screen for RC Model

- Boscam Galaxy D4 FPV 5.8G 32CH LCD 8 Inch Monitor With DVR Receiver
- Boscam Galaxy D2 FPV 5.8G 32CH LCD 7 Inch Monitor For DJI WLtoys
- Skyzone SKY-700D FPV 5.8G 32CH Diversity 7 Inch TFT Monitor DVR
- SkyZone SKY-01 V2 FPV AIO Goggles 5.8G 32CH Head Tracing Glasses
- Boscam GS923 FPV 5.8G 32CH Div AIO Wireless Video Glasses Without DVR
- Boscam GS923 FPV 5.8G 32CH Div AIO Wireless Video Glasses with DVR
- Main battery:

Building threads/Referral/Support forum
If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me hanging around some popular R/C and FPV forum below.
- Rcgroups.com - General multirotor forum
- MultiWii flight controller wiki
- MultiWii website
- Rush-OSD/KVOSD development
- KVOSD firmware, setup and wiring
- Fpvlab.com - MWOSD - for MultiWii
- DIYDRONES.com - Community for personal UAV
- 3DR - Drone & UAV Technology
- Android apps for MultiWii: EZ-GUI
