

About
** Before proceed to read further about my UAV Drifter build first visit my my archive page on (2012) FPV-Drifter Ultralight first for some basic building tips because the one i explain here is just extension of archived tips.
 Its almost been 5 years since we had talk about Drifter Ultralight on FPV and throughout its lifespan it has garner lots of follower, fan based and most importantly epic amount of adventure in the skies flawlessly with videos of jaw dropping beautiful FPV flight not only from me but also from other enthusiast spawn all over the world, on Youtube and other online social media. On my side now i own 3x Drifters Ultralights that runs with different flight roles. Somewhere in mid 2015 my third Drifter Ultralight build seems to do the impossible unlike any other FPV setup in the past. Infact it was no longer an FPV, its now a full fledge UAV specification. So in this article we're talking about UAV specification on my 3rd ES Ultralight build (UAV Drifter Ultralight #3-V5). Its the only Drifter that can fly
Its almost been 5 years since we had talk about Drifter Ultralight on FPV and throughout its lifespan it has garner lots of follower, fan based and most importantly epic amount of adventure in the skies flawlessly with videos of jaw dropping beautiful FPV flight not only from me but also from other enthusiast spawn all over the world, on Youtube and other online social media. On my side now i own 3x Drifters Ultralights that runs with different flight roles. Somewhere in mid 2015 my third Drifter Ultralight build seems to do the impossible unlike any other FPV setup in the past. Infact it was no longer an FPV, its now a full fledge UAV specification. So in this article we're talking about UAV specification on my 3rd ES Ultralight build (UAV Drifter Ultralight #3-V5). Its the only Drifter that can fly  autonomously from the start till the end of the flight without any user/pilot input along the way. Mission based flight feed into the plane and off it goes to explore the world autonomously or robotically at long range. Considering the fact its only at 950mm wingspan wait till you hear it actually carry almost 3x more lipo battery capacity than original FPV specification or almost 5x more capacity than manufacturer stock/default specification which is something impossible to carry for small size plane but yes i prove it it can!...it carries monster size 5200mah 3s lipo battery rated 40C! Despite being a UAV the Drifter come with a necessary companion the 3DR data radio telemetry ground station which needed as proxy between the aircraft and the ground pilot/crew as intermediately link between them to send in-flight live telemetry data to the user via handheld smartphone (Android) or computer for pilot/crew monitor the lane actual position/data and may send updated mission parameter to ES Drifter Ultralight. Drifter lives on with new leash of life in UAV world. Now lets read it all about it.
autonomously from the start till the end of the flight without any user/pilot input along the way. Mission based flight feed into the plane and off it goes to explore the world autonomously or robotically at long range. Considering the fact its only at 950mm wingspan wait till you hear it actually carry almost 3x more lipo battery capacity than original FPV specification or almost 5x more capacity than manufacturer stock/default specification which is something impossible to carry for small size plane but yes i prove it it can!...it carries monster size 5200mah 3s lipo battery rated 40C! Despite being a UAV the Drifter come with a necessary companion the 3DR data radio telemetry ground station which needed as proxy between the aircraft and the ground pilot/crew as intermediately link between them to send in-flight live telemetry data to the user via handheld smartphone (Android) or computer for pilot/crew monitor the lane actual position/data and may send updated mission parameter to ES Drifter Ultralight. Drifter lives on with new leash of life in UAV world. Now lets read it all about it.

Model specification & setup
Airframe type: Ultralight
Branding/Manufacturer: Easy Sky
Model name variant: DRIFTER
Material build: EPO 60% + Plastic 20% + Carbon fibre 20%
Wingspan: 950mm
Length: 850mm
UAV airframe weight without battery: 439 gram
Full UAV flying weight: 850 gram (on 5200mah 3s 30C)
Aileron: 1x 5g servo
Elevator: 1x 5g servo
Rudder: 1x 5g servo
ESC: 18A Turnigy Plush
Motor: Stock 2300KV (2s) when using 3s lipo throttle control max limit at 85%
External BEC: 5A/5V
Propeller: Stock 2 blade 7x3.5"
Radio receiver: Frsky telemetry 8ch
Radio receiver antenna: diversified DIY di-pole antenna
Battery (with front seat removed): 1x 5000mah~5200mah 3s 30c (Old FPV specification: 1x 2200mah 2s~3s 25c)
Center Gravity: 1/3 from the front leading edge of the wing. Nose tilt down 8% from horizontal.

My DIY UAV specification
Camera main: 520TVL mini CMOS with 90 degree FOV (1gram)
Camera HD: RUNCAM HD F2.8
Flight Control board: 3D Robotics APM/APM MINI PRO + GPS Ublox 7N (Uses Arduplane Version 3.4 firmware)
OSD: MinimOSD (MinimOSD-Extra firmware)
APM radio telemetry: 3DR radio telemetry + di-pole antenna
Voltage + Current sensor: 3DR power module 2-6s
Video transmitter: SKYZONE 5.8ghz 600mw
Video antenna: DIY tuned Clover Leaf
Battery: Shared with main.
Building
When i acquired a third second hand 'crashed' kit from one of our local R/C flying member, it was dented, torn wings especially on aileron and almost smacked nose..which is why as you can see the front nose looks slightly blunt and shorter that original stock looks on min Drifter. I bought it at cheap  price, give it some love by fixing it, rebuild it and gave it a second chance in life under a new ownership. I installed APM Mini Pro flight controller as core flight system with intention to FPV it later on. The hardware differences between this one and the old FPV specification Drifter was it fitted with APM Mini APM, MinimOSD, 3DR telemetry system, APM power module, mic-less Skyzone 5.8ghz 600mw rated video transmitter and a 1g 520TVL cmos camera embedded in the nose angled almost 20~25 degree downwards for live view piloting. Second camera is mounted with RUNCAM V1 HD camera loaded a month later located between landing gear inserts for HD recordings. 3DR telemetry radio located on the end of the plane tail which give a good separation away from sensitive RF emission from BEC, ESC, Servos, VTX, motors and camera which might capped the data telemetry transmission
price, give it some love by fixing it, rebuild it and gave it a second chance in life under a new ownership. I installed APM Mini Pro flight controller as core flight system with intention to FPV it later on. The hardware differences between this one and the old FPV specification Drifter was it fitted with APM Mini APM, MinimOSD, 3DR telemetry system, APM power module, mic-less Skyzone 5.8ghz 600mw rated video transmitter and a 1g 520TVL cmos camera embedded in the nose angled almost 20~25 degree downwards for live view piloting. Second camera is mounted with RUNCAM V1 HD camera loaded a month later located between landing gear inserts for HD recordings. 3DR telemetry radio located on the end of the plane tail which give a good separation away from sensitive RF emission from BEC, ESC, Servos, VTX, motors and camera which might capped the data telemetry transmission 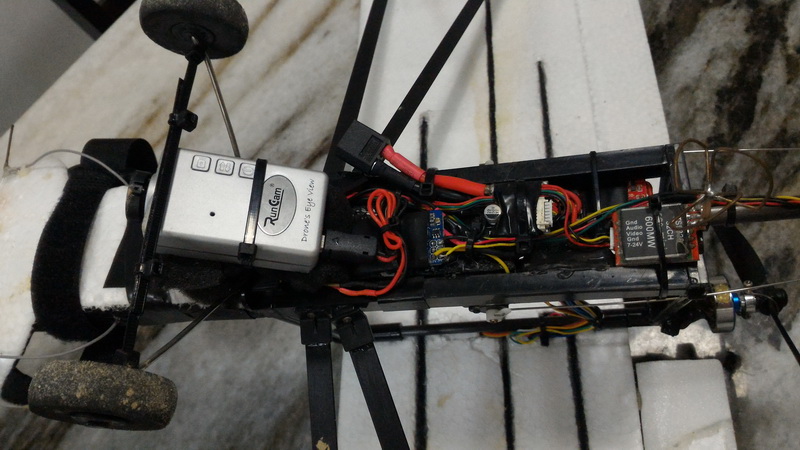 strength. It doesn't have pan-tilt camera capability which is unnecessary for UAV type flight because i won't be around looking in realtime when its flying by itself, thus shave extra gram out from the plane. On the plane itself some changes have been made to make it a UAV platform worthy: all the scale seat and pilot figure removed so that the front have more bigger space to place much bigger capacity and longer size lipo battery (5000~5200mah 3s 30~40c) and the main wing structure have been embedded with 3 rows of carbon rod as main spar to increase wing loading and rigidity. The CG remain unchanged despite having bigger and heavier battery. The landing gear both wheels struts end have been bridge together horizontally via thick zip ties to avoid it from bend and spreading sideways due to overloaded weight on front end during landing. Unfortunately 50% of the time it doesn't perform well on rough boingy terrain during landing causes the landing gear to bent and nose in and break the ziptie bridge. It only works well if it was a controlled landing (' controlled elevator up' landing) or on smooth concrete/tarmac runway.
strength. It doesn't have pan-tilt camera capability which is unnecessary for UAV type flight because i won't be around looking in realtime when its flying by itself, thus shave extra gram out from the plane. On the plane itself some changes have been made to make it a UAV platform worthy: all the scale seat and pilot figure removed so that the front have more bigger space to place much bigger capacity and longer size lipo battery (5000~5200mah 3s 30~40c) and the main wing structure have been embedded with 3 rows of carbon rod as main spar to increase wing loading and rigidity. The CG remain unchanged despite having bigger and heavier battery. The landing gear both wheels struts end have been bridge together horizontally via thick zip ties to avoid it from bend and spreading sideways due to overloaded weight on front end during landing. Unfortunately 50% of the time it doesn't perform well on rough boingy terrain during landing causes the landing gear to bent and nose in and break the ziptie bridge. It only works well if it was a controlled landing (' controlled elevator up' landing) or on smooth concrete/tarmac runway.
UAV building level difficulty/rating: Hard/Advance (2/10)
UAVequipment setup grade: Advanced
Building hours required: 48 hours
Skill required: Soldering/Foam cutting and ARDUINO programming for APM based hardware.
Critical issues during installation: Keeping the weight to most minimal.
Required additional mods/must do improvement: Beef up the motor mounting/solid reinforcement + re-glue all control hinges + landing gear + wing reinforcement.

APM parameters lists:
Here's the list of parameters used by UAV DRIFTER ULTRALIGHT #3 (Version 5) build. All the parameters are based on Arduplane V3.4 firmware. Some lines of parameter have been removed because parameters setting such as compass, acc and gyro sensors are very much based on "locality" factor setting which you need to do calibrate it by yourself. So copy the below parameter manually.
*Note:
- Assume you use the same hardware a setup as this build
- Different radio transmitter mode/setup requires different radio channel calibration range/PWM signal and flight mode.
- This parameter optimal for full flying weight approximately 850gram. Different weight, CG, motor combo power, or different servo performance/throw requires extra tuning.
========================================================
Firmware: ARDUPLANE v3.4 only
========================================================
| ACRO_LOCKING,0 ACRO_PITCH_RATE,180 ACRO_ROLL_RATE,180 AHRS_COMP_BETA,0.1 AHRS_GPS_GAIN,1 AHRS_GPS_MINSATS,6 AHRS_GPS_USE,1 AHRS_ORIENTATION,0 AHRS_RP_P,0.2 AHRS_TRIM_X,-0.002024328 AHRS_TRIM_Y,0.007544149 AHRS_TRIM_Z,0 AHRS_WIND_MAX,0 AHRS_YAW_P,0.2 ALT_CTRL_ALG,0 ALT_HOLD_FBWCM,0 ALT_HOLD_RTL,10000 ALT_MIX,1 ALT_OFFSET,0 ARMING_CHECK,0 ARMING_DIS_RUD,0 ARMING_REQUIRE,0 ARSPD_AUTOCAL,0 ARSPD_ENABLE,0 ARSPD_FBW_MAX,18 ARSPD_FBW_MIN,10 ARSPD_OFFSET,274.5496 ARSPD_PIN,0 ARSPD_RATIO,1.9936 ARSPD_SKIP_CAL,0 ARSPD_TUBE_ORDER,2 ARSPD_USE,0 AUTO_FBW_STEER,0 AUTOTUNE_LEVEL,6 BATT_AMP_OFFSET,0 BATT_AMP_PERVOLT,18.0018 BATT_CAPACITY,4200 BATT_CURR_PIN,12 BATT_MONITOR,4 BATT_VOLT_MULT,10.1 BATT_VOLT_PIN,13 BATT2_AMP_OFFSET,0 BATT2_AMP_PERVOL,17 BATT2_CAPACITY,3300 BATT2_CURR_PIN,12 BATT2_MONITOR,0 BATT2_VOLT_MULT,10.1 BATT2_VOLT_PIN,13 CAM_DURATION,10 CAM_SERVO_OFF,1100 CAM_SERVO_ON,1300 CAM_TRIGG_DIST,0 CAM_TRIGG_TYPE,0 ELEVON_CH1_REV,0 ELEVON_CH2_REV,0 ELEVON_MIXING,0 ELEVON_OUTPUT,0 ELEVON_REVERSE,0 FBWA_TDRAG_CHAN,0 FBWB_CLIMB_RATE,2 FBWB_ELEV_REV,0 FENCE_ACTION,0 FENCE_AUTOENABLE,2 FENCE_CHANNEL,0 FENCE_MAXALT,0 FENCE_MINALT,0 FENCE_RET_RALLY,0 FENCE_RETALT,0 FENCE_TOTAL,0 FLAP_1_PERCNT,0 FLAP_1_SPEED,0 FLAP_2_PERCNT,0 FLAP_2_SPEED,0 FLAP_IN_CHANNEL,0 FLAP_SLEWRATE,75 FLAPERON_OUTPUT,0 FLTMODE_CH,6 FLTMODE1,11 FLTMODE2,2 FLTMODE3,10 FLTMODE4,12 FLTMODE5,5 FLTMODE6,0 FORMAT_VERSION,13 FS_BATT_MAH,0 FS_BATT_VOLTAGE,10.9 FS_GCS_ENABL,0 FS_LONG_ACTN,0 FS_LONG_TIMEOUT,5 FS_SHORT_ACTN,0 FS_SHORT_TIMEOUT,1.5 GLIDE_SLOPE_MIN,15 GLIDE_SLOPE_THR,5 GND_ABS_PRESS,50349.65 GND_ALT_OFFSET,0 GND_TEMP,32.33176 |
GROUND_STEER_ALT,0 GROUND_STEER_DPS,90 HIL_ERR_LIMIT,5 HIL_MODE,0 HIL_SERVOS,0 INITIAL_MODE,0 INVERTEDFLT_CH,0 KFF_RDDRMIX,0.5 KFF_THR2PTCH,0 LAND_DISARMDELAY,20 LAND_FLAP_PERCNT,0 LAND_FLARE_ALT,3 LAND_FLARE_SEC,2 LAND_PITCH_CD,0 LEVEL_ROLL_LIMIT,5 LIM_PITCH_MAX,3500 LIM_PITCH_MIN,-3500 LIM_ROLL_CD,4200 LOG_BITMASK,16254 MAG_ENABLE,1 MIN_GNDSPD_CM,0 MIS_RESTART,0 MIS_TOTAL,28 MIXING_GAIN,0.5 NAV_CONTROLLER,1 NAVL1_DAMPING,0.75 NAVL1_PERIOD,13 PTCH2SRV_D,0.06438776 PTCH2SRV_I,0.08333334 PTCH2SRV_IMAX,3000 PTCH2SRV_P,0.8585034 PTCH2SRV_RLL,1 PTCH2SRV_RMAX_DN,75 PTCH2SRV_RMAX_UP,75 PTCH2SRV_TCONST,0.45 RALLY_LIMIT_KM,5 RALLY_TOTAL,0 RC1_DZ,30 RC1_MAX,1999 RC1_MIN,979 RC1_REV,1 RC1_TRIM,1485 RC10_DZ,0 RC10_FUNCTION,0 RC10_MAX,1900 RC10_MIN,1100 RC10_REV,1 RC10_TRIM,1500 RC11_DZ,0 RC11_FUNCTION,0 RC11_MAX,1900 RC11_MIN,1100 RC11_REV,1 RC11_TRIM,1500 RC2_DZ,30 RC2_MAX,1916 RC2_MIN,1065 RC2_REV,1 RC2_TRIM,1485 RC3_DZ,30 RC3_MAX,1913 RC3_MIN,1061 RC3_REV,1 RC3_TRIM,1066 RC4_DZ,30 RC4_MAX,1916 RC4_MIN,1065 RC4_REV,1 RC4_TRIM,1486 RC5_DZ,0 RC5_FUNCTION,0 RC5_MAX,1913 RC5_MIN,1062 RC5_REV,1 RC5_TRIM,1912 RC6_DZ,0 RC6_FUNCTION,0 RC6_MAX,2004 RC6_MIN,975 RC6_REV,1 RC6_TRIM,979 RC7_DZ,0 RC7_FUNCTION,0 RC7_MAX,1900 RC7_MIN,1100 RC7_REV,1 RC7_TRIM,1494 RC8_DZ,0 RC8_FUNCTION,0 RC8_MAX,1702 RC8_MIN,1176 RC8_REV,1 RC8_TRIM,1494 |
RCMAP_PITCH,2 RCMAP_ROLL,1 RCMAP_THROTTLE,3 RCMAP_YAW,4 RELAY_DEFAULT,0 RELAY_PIN,13 RELAY_PIN2,-1 RELAY_PIN3,-1 RELAY_PIN4,-1 RLL2SRV_D,0.03569669 RLL2SRV_I,0.08333334 RLL2SRV_IMAX,3000 RLL2SRV_P,0.4759558 RLL2SRV_RMAX,75 RLL2SRV_TCONST,0.45 RNGFND_FUNCTION,0 RNGFND_GNDCLEAR,10 RNGFND_LANDING,0 RNGFND_MAX_CM,700 RNGFND_MIN_CM,20 RNGFND_OFFSET,0 RNGFND_PIN,-1 RNGFND_PWRRNG,0 RNGFND_RMETRIC,1 RNGFND_SCALING,3 RNGFND_SETTLE,0 RNGFND_STOP_PIN,-1 RNGFND_TYPE,0 RNGFND2_FUNCTION,0 RNGFND2_GNDCLEAR,10 RNGFND2_MAX_CM,700 RNGFND2_MIN_CM,20 RNGFND2_OFFSET,0 RNGFND2_PIN,-1 RNGFND2_RMETRIC,1 RNGFND2_SCALING,3 RNGFND2_SETTLE,0 RNGFND2_STOP_PIN,-1 RNGFND2_TYPE,0 RSSI_PIN,-1 RSSI_RANGE,5 RST_MISSION_CH,0 RST_SWITCH_CH,0 RTL_AUTOLAND,0 RUDDER_ONLY,0 SCALING_SPEED,15 SCHED_DEBUG,0 SERIAL0_BAUD,115 SERIAL1_BAUD,57 SERIAL1_PROTOCOL,1 SERIAL2_BAUD,57 SERIAL2_PROTOCOL,1 SERIAL3_BAUD,38 SERIAL3_PROTOCOL,5 SERIAL4_BAUD,38 SERIAL4_PROTOCOL,5 SKIP_GYRO_CAL,0 SR0_EXT_STAT,2 SR0_EXTRA1,6 SR0_EXTRA2,6 SR0_EXTRA3,1 SR0_PARAMS,10 SR0_POSITION,2 SR0_RAW_CTRL,2 SR0_RAW_SENS,1 SR0_RC_CHAN,2 SR1_EXT_STAT,1 SR1_EXTRA1,1 SR1_EXTRA2,1 SR1_EXTRA3,1 SR1_PARAMS,10 SR1_POSITION,1 SR1_RAW_CTRL,1 SR1_RAW_SENS,1 SR1_RC_CHAN,1 STAB_PITCH_DOWN,2 STALL_PREVENTION,1 STEER2SRV_D,0.005 STEER2SRV_I,0.2 STEER2SRV_IMAX,1500 STEER2SRV_MINSPD,1 STEER2SRV_P,1.8 STEER2SRV_TCONST,0.75 STICK_MIXING,1 SYS_NUM_RESETS,241 SYSID_MYGCS,255 SYSID_SW_TYPE,0 SYSID_THISMAV,1 |
TECS_CLMB_MAX,5 TECS_HGT_OMEGA,3 TECS_INTEG_GAIN,0.1 TECS_LAND_ARSPD,-1 TECS_LAND_DAMP,0.5 TECS_LAND_PMAX,10 TECS_LAND_SINK,0.25 TECS_LAND_SPDWGT,1 TECS_LAND_TCONST,2 TECS_LAND_THR,-1 TECS_PITCH_MAX,0 TECS_PITCH_MIN,0 TECS_PTCH_DAMP,0 TECS_RLL2THR,10 TECS_SINK_MAX,5 TECS_SINK_MIN,2 TECS_SPD_OMEGA,2 TECS_SPDWEIGHT,1 TECS_THR_DAMP,0.5 TECS_TIME_CONST,5 TECS_VERT_ACC,7 TELEM_DELAY,0 THR_FAILSAFE,0 THR_FS_VALUE,950 THR_MAX,70 THR_MIN,0 THR_PASS_STAB,0 THR_SLEWRATE,100 THR_SUPP_MAN,0 THROTTLE_NUDGE,1 TKOFF_FLAP_PCNT,0 TKOFF_ROTATE_SPD,0 |
========================================================

UAV flight characteristic and performance
If you've been following FPV Drifter development and its epic adventures since 2011 and onwards it is no doubt that this platform is a superb FPV platform not only for scale like cockpit FPV flight but also general multipurpose flying. It handles well in many sort of condition, dry hot weather, cold wet clouds, over the clouds, long range and etc. As an FPV plane it has shown its stars high flown above the clouds. So what about in UAV autonomous flight configuration will it fly as good as manually driven FPV setup? Well it fly almost the same flight handling as previous FPV setup but with only one differences; its cruise speed increase up to 53km/h where the stick is at 53~54% throttle travel to keep it afloat and moving forward because the extra weight it carried. Despite flying heavy loaded nose heavy battery it is still unexplained yet mind boggling why it can flew with nose up 3 degree as indicated on 3DR telemetry screen (still tail heavy).....hmmm... but hey it flies! that matters the most. The APM did calibrated to stay flat before its maiden flight. I've been running numerous mission flight both short and long distance and very satisfied with the fact in can handle rough and windy condition despite being overweight plus i do notice it also far stable than bigger version of UAV build which soon i will reveal this new big UAV on next chapter. As being flown automatically (pilotless) via waypoint and autonomous mission flight the APM MINI PRO flight controller loaded with Arduplane 3.4 firmware handled very well thanks to months of tuning and much research over the internet. When doing Aerial mapping and 3d maping mission where it needed to fly in grid formation and do tight turning to proceed to another waypoint or sometimes zig zag like movement the drifter very well during sharp cornering in manners of "bank and yank" turning without rudder assistance..no indication of stall despite turning such a tight radius almost 20~30 radius...very good indeed. However it does take longer runway to take-off and landing due to its weight at 850 gram as oppose to normal 680gram in FPV form.
flight but also general multipurpose flying. It handles well in many sort of condition, dry hot weather, cold wet clouds, over the clouds, long range and etc. As an FPV plane it has shown its stars high flown above the clouds. So what about in UAV autonomous flight configuration will it fly as good as manually driven FPV setup? Well it fly almost the same flight handling as previous FPV setup but with only one differences; its cruise speed increase up to 53km/h where the stick is at 53~54% throttle travel to keep it afloat and moving forward because the extra weight it carried. Despite flying heavy loaded nose heavy battery it is still unexplained yet mind boggling why it can flew with nose up 3 degree as indicated on 3DR telemetry screen (still tail heavy).....hmmm... but hey it flies! that matters the most. The APM did calibrated to stay flat before its maiden flight. I've been running numerous mission flight both short and long distance and very satisfied with the fact in can handle rough and windy condition despite being overweight plus i do notice it also far stable than bigger version of UAV build which soon i will reveal this new big UAV on next chapter. As being flown automatically (pilotless) via waypoint and autonomous mission flight the APM MINI PRO flight controller loaded with Arduplane 3.4 firmware handled very well thanks to months of tuning and much research over the internet. When doing Aerial mapping and 3d maping mission where it needed to fly in grid formation and do tight turning to proceed to another waypoint or sometimes zig zag like movement the drifter very well during sharp cornering in manners of "bank and yank" turning without rudder assistance..no indication of stall despite turning such a tight radius almost 20~30 radius...very good indeed. However it does take longer runway to take-off and landing due to its weight at 850 gram as oppose to normal 680gram in FPV form.
 Minimum level of VLOS flight experience required/flight-hours: Advance(580 hour)
Minimum level of VLOS flight experience required/flight-hours: Advance(580 hour)
Minimum level of basic UAV flight experience required/flight-hours: Intermediate (300 hour)
Nature of platform handling experience/skill required: Glider, scale and acrobatic flight
Self leveling capability in thumbs-off stick situation: Yes
Take-off & landing difficulty: Medium
Hand launch: No
Max speed: 61~63km/h
Cruise speed: 48~53km/h
Min speed before stall: 36km/h
UAV flight/radius: Unlimited (given above UAV spec/setup)
Max altitude: -
Bail-out/fail safe recovery altitude limit: 10~30m
UAV safe distance range for testing: 700~900m (Open field)
High angle of attack (AOA) tolerance limit before stall: 28 degree.
Ground "STOL" (Short Take Off and Landing) capability/thrust%: Takeoff 30m (80%)/ Landing 45m (20%)
Altitude climbing power/thrust%/AOA angle: 2 sec/per-meter at 52% thrust/20 degree
360 degree turning radius clearance/holding pattern: 60~90m
360 barrel roll/loop acro flight: No (Aerobatic)
Control expo - aileron: 45% (low to high)
Control expo - elevator: 45% (low to high)
Control expo - rudder: 45% (low to high)
Control end point - aileron: 80% (low to high)
Control end point - elevator: 100% (low to high)
Control end point - rudder: 100% (low to high)
Flight time: 25~45 min
Ground spotter visibility (LOS): 400~600m
Ground spotter audible (LOS): 700~900m
Radio data telemetry max range: 13km straight line

Safety issue
So far no problem, just like its old sibling which flew more than 5 years its still the most floaty plane despite being small in size compare to the ratio distance it travelled. It handled sharp cornering turn very wall to the point most normal plane will stall with such weight. Its still the champion airframe for more than 5 years of historical long and high altitude flyer. In UAV configuration its already proven to fly without an issues as shown in many UAV flight videos made by this plane. Seeing is believing.
Pros and Cons
The most contrast differences between FPV Drifter and UAV Drifter is the weight depending what size battery it is used.
* Some Pro and Cons have been mentioned in previous FPV-Drifter Ultralight article (Click Here).
Pros:
- No need full control/ relax on control since plane flying automatically based on user's pre-loaded mission/waypoint.

- Long range low altitude flight.
- Less FPV hardware setup used mainly for take-off and landing monitoring.
Cons:
- Slightly heavier at 850gram instead of average 650gram on FPV due to battery weight on UAV setup thus required extra throttle/thrust on various flight maneuvers..
- Need longer take-off and landing site due to increase battery weight requirement.
- Extra reinforcement work on the main wings spar and main landing gear.
- Longer learning curve to setup autonomous system and extra programming knowledge in ARDUINO code for APM hardware.

Current status & flight history
UAV Drifter #3-V5, even though born slightly 3 years younger than its FPV version of its siblings still it have accumulate 'rapid' amount of flight time and 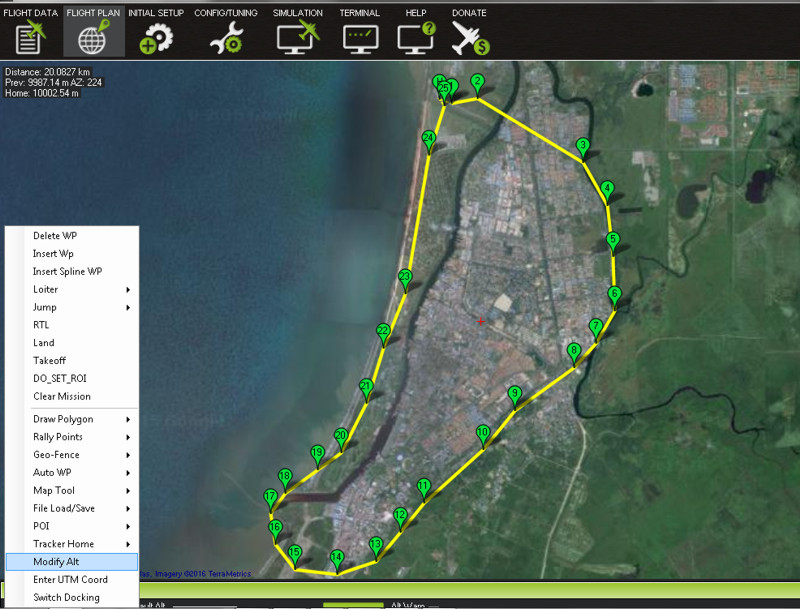 more active doing long range flight in wide circuit flight path to cover bigger area than FPV version. Its the plane i most preferred to use when i want explore uncharted area or places unreachable where it deem impossible for FPV platform to achieved. For example: for an FPV Drifter to go further distance FPV pilot has to climb manually at higher altitude to get better video/radio connection to the pilot on the ground for it to travel further distance, but for a UAV autonomous flight on Drifter this is unnecessary as it to be flown autonomous and independent from radio or video control from the ground pilot, flew low altitude without any problem regardless distance as it is independent from any source of human contorl...robotic flight 100%. Only both FPV and UAV plane stamina/endurance are determined by its battery capacity consumed. Not only it capable to fly far but also does other task such as scientific aerial mapping, 3D maping and other cool things as shown in the attached video in this page. Thus having UAV platform mean, pilot can relaxed from control and walk away from the site until the plane return back half hour later from the mission. FPV pilot more likely getting tanned under the sun (just like what happened to me now) than UAV pilot seating in the living room watching TV or sleeping while waiting for its return by sending signal of its arrival via PC/Smartphone radio link.
more active doing long range flight in wide circuit flight path to cover bigger area than FPV version. Its the plane i most preferred to use when i want explore uncharted area or places unreachable where it deem impossible for FPV platform to achieved. For example: for an FPV Drifter to go further distance FPV pilot has to climb manually at higher altitude to get better video/radio connection to the pilot on the ground for it to travel further distance, but for a UAV autonomous flight on Drifter this is unnecessary as it to be flown autonomous and independent from radio or video control from the ground pilot, flew low altitude without any problem regardless distance as it is independent from any source of human contorl...robotic flight 100%. Only both FPV and UAV plane stamina/endurance are determined by its battery capacity consumed. Not only it capable to fly far but also does other task such as scientific aerial mapping, 3D maping and other cool things as shown in the attached video in this page. Thus having UAV platform mean, pilot can relaxed from control and walk away from the site until the plane return back half hour later from the mission. FPV pilot more likely getting tanned under the sun (just like what happened to me now) than UAV pilot seating in the living room watching TV or sleeping while waiting for its return by sending signal of its arrival via PC/Smartphone radio link.
Lifespan operation: 1 years (updated on 11 Apr 2016 for Drifter #3)
Start operation: mid 2015 (Drifter #3)
Maintenance priority check: Motor mounting.
Constant critical issue: Bent landing gear due to battery overweight.
Maintenance cost per-lifespan: None
Flight hours accumulated per-lifespan on DRIFTER #3 (Full UAV): 28 hours (updated on 11 Apr 2016)
Best L.O.S distance record for Drifter #3 : 15km
Best total distance covered per-session flight: 24km
Est. distance covered per-lifespan (UAV Drifter#3): 1,239km (Odo) (updated on 11 Apr 2016)
Best height record: -
Best flight time record per-session: 30min (5200mah 3s 40C for Drifter #3)
Activity status: Still active.

Autonomous flight feature:
So what does this UAV- ES Drifter Ultralight do which makes it more special than ordinary FPV drones? We'll there lots of things this plane can do to make pilot life easier, means you almost don't need to touch your radio controller to make the plane move or do the work...everything is robotics written all over the plane. But to keep the words simple below are the list of thing that this plane does...what i listed is something that was already tested but i just tap 50% of its current potential. I will discover the remaining 50% soon:
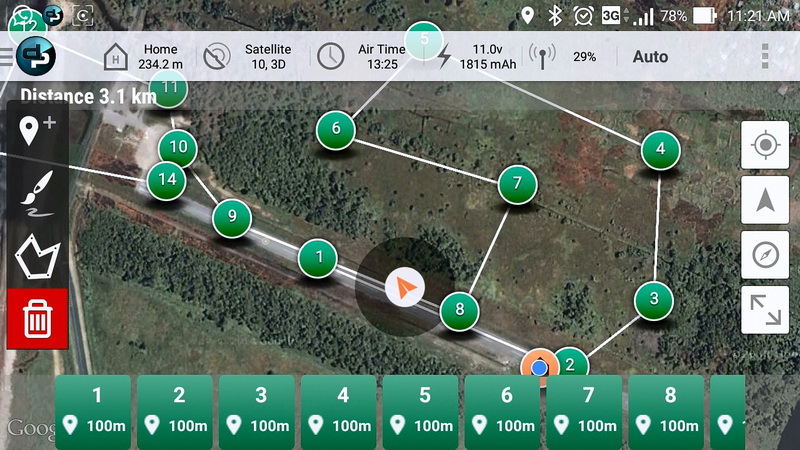
 Autonomous flight/ Waypoint flight: Yes, no hands flight. It flew by itself. I can also do auto take-off and landing too.
Autonomous flight/ Waypoint flight: Yes, no hands flight. It flew by itself. I can also do auto take-off and landing too.- Follow me: You seen it before....something you saw on my multicopter project video but i don't use it much.
- Touch to fly: I you have a gamepad you can use to fly it instead of using your aircraft radio controller else just point on your smart devices touch screen to command your flight.
- Grid flight for aerial or 3D mapping (Geospatial) flight: I think you saw 2x samples i made on my Youtube channel.
- ROI inspection flight (Region Of Interest): Just point that area you want to explore or do aerial inspection with gimbal camera and the plane do its magical works capture the ground object in all angle.
- Servo trigger type mission: Something that trigger servo movement like dropping payload or activate camera, suitable for parcel delivery services on drones where it can land drop the package or touch 'n' go drop something that Google, Amazon and DHL drone are experimenting at the time of my writings.
- ....yet to discover..to be continue... Open source are cool!
 To make all this automation possible a ground computing device needed to communicate 2 ways and send command to the plane. These are:
To make all this automation possible a ground computing device needed to communicate 2 ways and send command to the plane. These are:
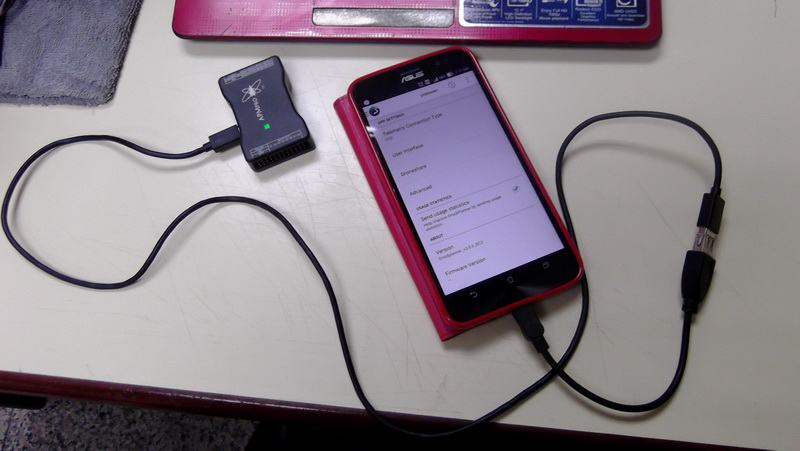
- Ground telemetry data USB module (3DR radio data telemetry): Radio receiver/transmitter used to connect to smart devices such as smartphone or notebook.via USB. Usually this module mounted over camera tripod for good radio height dispersion.
- Smartphone (Android), tablet or notebook: Needed 3DR/APM Mission planner (Tower or Droid Planner for Android phones/tablet) software as user interface to link/interact with the UAV aircraft model via Radio telemetry USB port
- (*Optional) A gamepad or joystick devices: To connect to computing devices for extra manual control if needed instead of using aircraft model radio controller.
To sum up everything above, the pilot does nothing just sit down, relax and watch the show. Almost the same thing what military grade drone do i guess.
Latest Log:
(updated: -)
- -

Summary
 After flying FPV for many years standing almost stationary under the hot sun at the same time moving my whole body and arm around to obtain clear video signal by panning the video/radio antenna is pretty tiring task to accomplish. Now i'm getting too old for that, sloppy and really doesn't have much stamina to stand around manually flying my plane while keeping eye where i'm going. With the new UAV setup on my Drifter, its a whole new way to more easier approach to discover the world from above via automation and robotic approach to flying. Just setup the waypoint via my tablet, smartphone or on my PC, upload the mission, launch the plane and it will fly auto/autonomously till the end of its mission/waypoint flight without pilot intervention....i can sit back. relax and do other things while awaiting for its return. I can watch it live or view pre-recorded on board HD videos, i
After flying FPV for many years standing almost stationary under the hot sun at the same time moving my whole body and arm around to obtain clear video signal by panning the video/radio antenna is pretty tiring task to accomplish. Now i'm getting too old for that, sloppy and really doesn't have much stamina to stand around manually flying my plane while keeping eye where i'm going. With the new UAV setup on my Drifter, its a whole new way to more easier approach to discover the world from above via automation and robotic approach to flying. Just setup the waypoint via my tablet, smartphone or on my PC, upload the mission, launch the plane and it will fly auto/autonomously till the end of its mission/waypoint flight without pilot intervention....i can sit back. relax and do other things while awaiting for its return. I can watch it live or view pre-recorded on board HD videos, i  can program the plane to do cool things like aerial mapping, 3d scan the terrains, follow me flight and other cool automated things possible by air. Planes activity can be monitor either via standard FPV style or via telemetry data wirelessly send to my portable smart devices such as my phone. Life is good! Ever since i have my Drifter Ultralight converted to UAV automation i manage to completely explore 95% my local places, beaches, country side and many other places deem impossible on FPV was now possible as UAV setup with almost zero "0' effort at the site. The flights was flown perfectly stable and took many great HD footage of grounds details too thanks to great all weather onboard stabilization system. But don't get me wrong i still do love flying FPV because cloud flying still fun thing to do when my mood comes in, UAV system play in different field so best to have both type of ES Drifter Ultralight on various occasion. Fortunately if you checked my Drifter inventory there is a second Drifter that were built to have both of these cool feature into one.
can program the plane to do cool things like aerial mapping, 3d scan the terrains, follow me flight and other cool automated things possible by air. Planes activity can be monitor either via standard FPV style or via telemetry data wirelessly send to my portable smart devices such as my phone. Life is good! Ever since i have my Drifter Ultralight converted to UAV automation i manage to completely explore 95% my local places, beaches, country side and many other places deem impossible on FPV was now possible as UAV setup with almost zero "0' effort at the site. The flights was flown perfectly stable and took many great HD footage of grounds details too thanks to great all weather onboard stabilization system. But don't get me wrong i still do love flying FPV because cloud flying still fun thing to do when my mood comes in, UAV system play in different field so best to have both type of ES Drifter Ultralight on various occasion. Fortunately if you checked my Drifter inventory there is a second Drifter that were built to have both of these cool feature into one.

Videos/Medias![]() Here are some of my video and gallery related to the above topics:
Here are some of my video and gallery related to the above topics:
- Gallery: UAV - ES Drifter Ultralight - 950mm
- My Youtube channel: 3DXL
- My Videos:
- 20km Down Town mission, UAV drone - Drifter ultralight
- 21km Hazy Adventure mission, UAV drone - Drifter ultralight
- 17km Destination Runway mission, UAV drone - Drifter ultralight
- 24km Delta River, UAV drone - Drifter ultralight
- 19km City Marina, UAV drone - Drifter ultralight
- 18.6km Morning Tour, UAV drone - Drifter ultralight
- 20km Beachline crossing, UAV drone - Drifter ultralight
- 18.5km River cross, UAV drone - Drifter ultralight
- Aerial 3D mapping - Building area using UAV Drifter ultralight on APM
- Aerial 3D mapping - Green lake area using UAV Drifter ultralight on APM
- Aerial 3D mapping - Reservoir area using UAV Drifter ultralight on APM
- UAV Drifter ultralight - Shoreline mission flight on APM
- UAV Drifter ultralight - 18km cross country autonomous flight on APM
- UAV Drifter ultralight - 15.36km autonomous flight on APM
Shopping list
Here i've listed some raw material, hardware and stuff where you can start building your own UAV autonomous platform. The list contain the above hardware and also include some compatible ones which you can pickup what suits best for your need and your budget. So come dig around and start your autonomous flying ambition:
** Take note the one with marked (*) is the default hardware i use on my setup while the non ones are compatibles.
- Platform/Airframe:

- Radio set/combo:
- ESC:
- BEC:
- Camera (FPV):
- Secondary HD camera:
- Flight controller (APM/Pixhawk series):
- OSD module (APM/Pixhawk compatible):
- Radio data telemetry unit (APM/Pixhawk series): Ground station unit (Android/tablet/smartphone):
- Video transmitter:
- *Skyzone Upgrade TS5828S 40CH 5.8G 600MW RP-SMA Female FPV Transmitter
- Skyzone Upgrade TS5823S 40CH 5.8G 200MW AV Transmitter Module RP-SMA Female
- Skyzone TS58400 5.8G 400mW 32CH AV Transmitter Module
- Boscam FPV 5.8G 200mW AV Wireless Transmitter TS351
- Boscam FT953 5.8G 400mw 32CH Mini FPV AV Transmitter
- Video receiver/FPV LCD/FPV video goggle:

- *Boscam GS923 FPV 5.8G 32CH Div AIO Wireless Video Glasses Without DVR
- Fatshark Dominator V3 FPV Video Goggles Glasses WVGA 720p HDMI 800X480
- Fatshark Fat Shark Dominator HD V2 FPV Goggles Video Glasses Headset
- Skyzone SKY02 SKY02S V3 5.8G 40CH AIO 3D FPV Goggles Only Video Glasses Headset
- Skyzone V2 5.8G 40CH FPV Goggles With Raceband Video Glasses Headset
- Skyzone SKY-700D FPV 5.8G 32CH Diversity 7 Inch TFT Monitor DVR
- Skyzone HD02 40CH 5.8G 7 Inch 1024x600 HD FPV Monitor HDMI With/Without DVR Build in Battery
- Battery:

Building threads/Referral
If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me wondering around some popular R/C and FPV/UAV forum below.
- Rcgroups Drifter Ultralight FPV build discussion (We are here!)

- Rcgroups FPV forum
- http://www.diydrones.com
- http://www.rcexplorer.se
- 3DR/APM Ardupilot - Arduplane manual
- 3DR/APM Ardupilot - MinimOSD installation guide
- 3DR/APM Ardupilot - Configuring telemetry
- MinimOSD Extra firmware and tools
- Ardupilot - Plane resources
- 3DR APM mission planner software overview
- 3DR APM Ardupilot download center
- 3DR tower apps for Android. (GooglePlay)
- Droid Planner 2 apps Android. (GooglePlay)
- Droid Planner apps Android. (GooglePlay)
