

About
The VOLANTEX RC: RANGER 757-4 has been around almost a year at both international market and local scene. My first glimpse of of RANGER was at 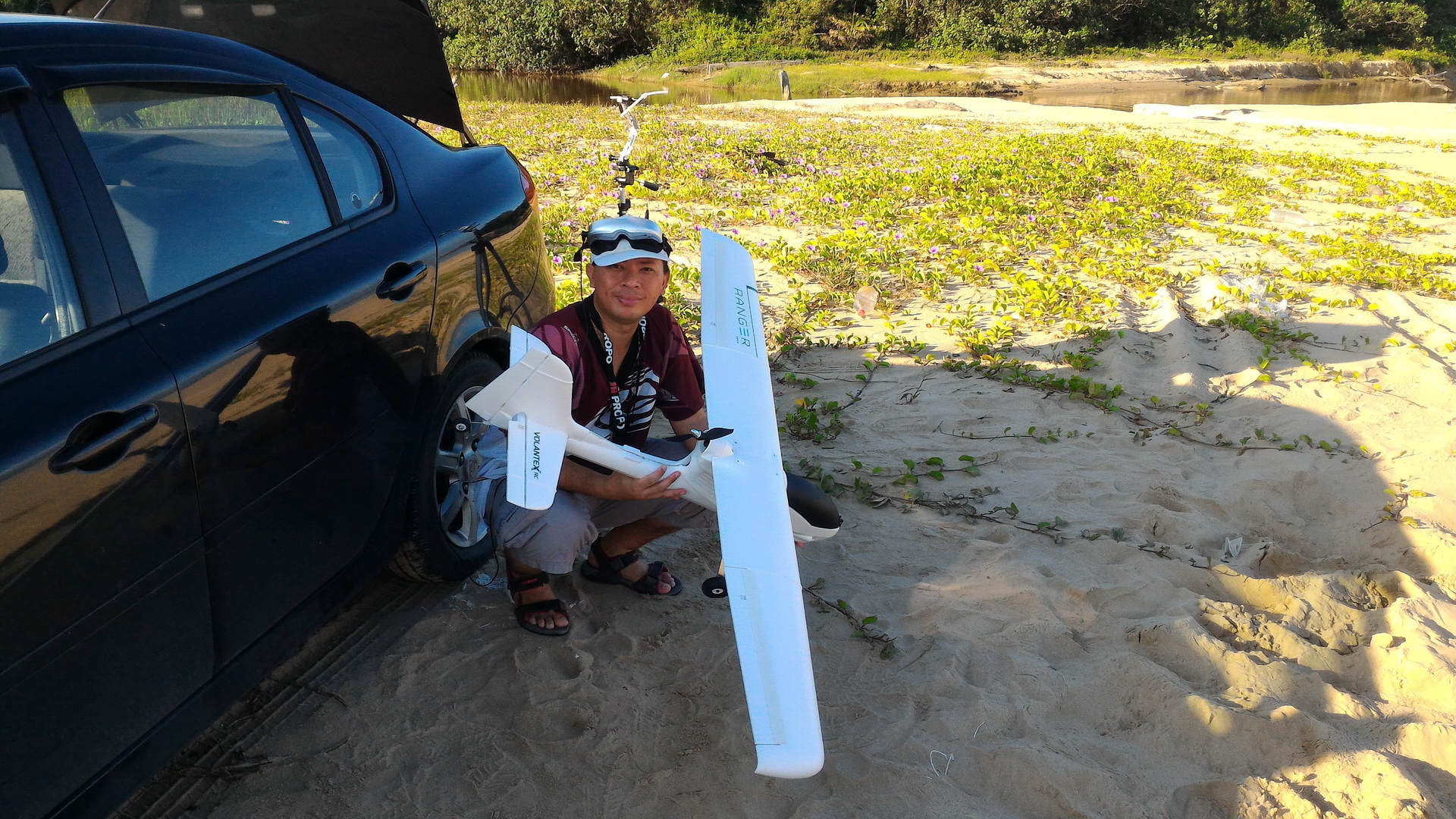 local R/C flying bash didn't even flinch my interest yet because my attachment to FPV/UAV Drifter Ultralight which i assume does better in the wind and full fill overall my flight enjoyment. Another factor is that no one yet to push this plane to its edge or proven anything worthy than just hovering around in the wind which i assume was a bad characteristic for not able to fight the wind as good as my Drifter (which is true after i did some test). So i'm not convincing yet to move on until one day i get tired of flying my UAV Drifter Ultralight #3 V5 as it already max out it performance, so i need to find a replacement to quench my thirst for more longer range. I'm a scale guy so this RANGER is obviously isn't looks as aerodynamic looking plane on the market, 1380mm wingspan,
local R/C flying bash didn't even flinch my interest yet because my attachment to FPV/UAV Drifter Ultralight which i assume does better in the wind and full fill overall my flight enjoyment. Another factor is that no one yet to push this plane to its edge or proven anything worthy than just hovering around in the wind which i assume was a bad characteristic for not able to fight the wind as good as my Drifter (which is true after i did some test). So i'm not convincing yet to move on until one day i get tired of flying my UAV Drifter Ultralight #3 V5 as it already max out it performance, so i need to find a replacement to quench my thirst for more longer range. I'm a scale guy so this RANGER is obviously isn't looks as aerodynamic looking plane on the market, 1380mm wingspan,  flying weight between 1.38kg on basic FPV spec, stubby nose with astronaut helmet like canopy, tall landing gear, big wheels and flies slow too..almost hovering speed but something makes it harder to land because it still hovering above the ground despite already cut-off the throttle..is that good or bad? You guys already knew from the start i'm not a big fan of heavy planes....but that was about to change soon. (Btw i already have bad luck with big planes that turned into FPV or UAV spec drones in the pass because of wind factor...remember that 1600mm Victor(@XUAV/@Bixler) Sky Surfer and Mini Sky hunter last year?..hint at my twitter).
flying weight between 1.38kg on basic FPV spec, stubby nose with astronaut helmet like canopy, tall landing gear, big wheels and flies slow too..almost hovering speed but something makes it harder to land because it still hovering above the ground despite already cut-off the throttle..is that good or bad? You guys already knew from the start i'm not a big fan of heavy planes....but that was about to change soon. (Btw i already have bad luck with big planes that turned into FPV or UAV spec drones in the pass because of wind factor...remember that 1600mm Victor(@XUAV/@Bixler) Sky Surfer and Mini Sky hunter last year?..hint at my twitter).
 Fate was sealed when our local shop offered me dirt cheap bargain for a RANGER 757-4 kit by April 2016...doesn't come with electronics because i'm at max level of stingyness on spending these with low expectation on its build. So most of the electronics parts used to built this plane into UAV was made out of recycled parts or 2nd hand used parts from other plane. Unfortunately the kit i got was an early batch that comes without plastic hinges on all control surfaces. The flexed foam soo thin i think any time the aileron, elevator and rudder can torn any moments during flight so before that i did made mods to install plastic hinges, its the only parts need extensive work and after that its smooth sailing for the remaining builds. Surprisingly overall build into full autonomous UAV specification took me only 1 week to complete and reached its flight perfection with build budget 40% less than building UAV drifter ultralight #3 -v5. Cheapo! A month worth of autonomous flight using APM Mini Pro flight controller (Arduplane firmware) was a success thanks a copy of setup from smaller plane the UAV - Drifter Ultralight #3 (Adopt same APM parameter). What once was plane of shame in my book now a hall of fame in my hangar. So lets talk about this plane and read all about it right here below.
Fate was sealed when our local shop offered me dirt cheap bargain for a RANGER 757-4 kit by April 2016...doesn't come with electronics because i'm at max level of stingyness on spending these with low expectation on its build. So most of the electronics parts used to built this plane into UAV was made out of recycled parts or 2nd hand used parts from other plane. Unfortunately the kit i got was an early batch that comes without plastic hinges on all control surfaces. The flexed foam soo thin i think any time the aileron, elevator and rudder can torn any moments during flight so before that i did made mods to install plastic hinges, its the only parts need extensive work and after that its smooth sailing for the remaining builds. Surprisingly overall build into full autonomous UAV specification took me only 1 week to complete and reached its flight perfection with build budget 40% less than building UAV drifter ultralight #3 -v5. Cheapo! A month worth of autonomous flight using APM Mini Pro flight controller (Arduplane firmware) was a success thanks a copy of setup from smaller plane the UAV - Drifter Ultralight #3 (Adopt same APM parameter). What once was plane of shame in my book now a hall of fame in my hangar. So lets talk about this plane and read all about it right here below.

Model specification & setup
 Airframe type: Glider
Airframe type: Glider
Branding/Manufacturer: VOLANTEX RC
Model name variant: RANGER 757-4 (early batch)
Material build: EPO foam (Extremely durable)
Wingspan: 1380mm
Length: -
Stock airframe weight: 460 gram
Full FPV/UAV flying weight: 1.38kg
Aileron: 2x 9g servo digital MG
Elevator: 1x 9g servo digital MG
Rudder: 1x 9g servo digital MG
ESC: 35A (ZTW brand...i pull it out from DURAFLY aka FMS models)
Motor: LT2212 1400KV
External BEC: 7A/5V
Propeller: Stock 2 blade 8"x4 APC
Radio receiver: Frsky telemetry 8ch
Radio receiver antenna: Stock
Battery: LG MJ1 NRI 18560 Li-on (3500mah per-cell) 10,500mah 3s3p 10A **started using this on 3rd mission.
Center Gravity: Exactly under the aileron servo wiring cover.

My DIY UAV specification
Camera HD (main): RUNCAM HD F2.8 (with live video output)
Flight Control board: 3D Robotics APM/APM MINI PRO + GPS Ublox 7N (Uses Arduplane Version 3.4 firmware)
OSD: None (For the first and second mission it has a MimiOSD but was remove after that to reduce current load )
APM radio telemetry: 3DR radio telemetry + di-pole antenna
Voltage + Current sensor: 3DR power module 2-6s
Video transmitter: SKYZONE 5.8ghz 600mw
Video antenna: DIY tuned Clover Leaf
Battery: Shared with main.

Building
The Volantex RC - RANGER 757-4 is the most easiest plane to assemble and also most portable plane to transport via instant disassembly all made possible via attachment using bunch of durable screws. No messy glue needed and need  less brain to work with this plane. Adding FPV or UAV hardware into the plane is easy with almost no working mods to cut the foam or chopping of parts of the plane just to fit camera, flight controller, video modules or other necessities because the manufacturer already figure it out in advance the common place holders for several required equipment inside the plane (They already figured it out for you). The size of cavity inside the plane enough to fit anything you can imagine including monster size battery. (Unfortunately the latest release of 757-4 have much narrower cavity due to thick foamy wall on font fuselage, if you fount the early model the go get that one). My observation made assumption that the person who design and build this plane must be 100% highly enthusiast FPV/UAV pilot which i must say it they did max excellent job on this plane. Assembly can take about 15 minutes to make out the shape of complete plane. The main wings already pre-installed embedded with balsa spar on the outer wings while the center most is reinforced with large diameter aluminum rods. Why manufacturer/designer prefer heavy aluminum spar? why not
less brain to work with this plane. Adding FPV or UAV hardware into the plane is easy with almost no working mods to cut the foam or chopping of parts of the plane just to fit camera, flight controller, video modules or other necessities because the manufacturer already figure it out in advance the common place holders for several required equipment inside the plane (They already figured it out for you). The size of cavity inside the plane enough to fit anything you can imagine including monster size battery. (Unfortunately the latest release of 757-4 have much narrower cavity due to thick foamy wall on font fuselage, if you fount the early model the go get that one). My observation made assumption that the person who design and build this plane must be 100% highly enthusiast FPV/UAV pilot which i must say it they did max excellent job on this plane. Assembly can take about 15 minutes to make out the shape of complete plane. The main wings already pre-installed embedded with balsa spar on the outer wings while the center most is reinforced with large diameter aluminum rods. Why manufacturer/designer prefer heavy aluminum spar? why not  using lightweight carbon spar as preferred by most end user/consumer? I did figured it out why they aluminum because these material does not have a breaking point and if it does it bend yield slowly allow the wings to have extra chances to maintain its approximate shape. Carbon rods stiff but doesn't bend or yield so its snaps without warning causing to the wings to collapse immediately during flight. With such mass and huge fuselage cavity on this plane there's high possibility that mods might overweight their plane and the aluminum rods is the best solution for early warning indicator to minimized wing collapsing without warning. Manufacturer did a good moves on it. Oh btw their tail wing elevator also fully reinforces with a spar balsa wood too, nice.
using lightweight carbon spar as preferred by most end user/consumer? I did figured it out why they aluminum because these material does not have a breaking point and if it does it bend yield slowly allow the wings to have extra chances to maintain its approximate shape. Carbon rods stiff but doesn't bend or yield so its snaps without warning causing to the wings to collapse immediately during flight. With such mass and huge fuselage cavity on this plane there's high possibility that mods might overweight their plane and the aluminum rods is the best solution for early warning indicator to minimized wing collapsing without warning. Manufacturer did a good moves on it. Oh btw their tail wing elevator also fully reinforces with a spar balsa wood too, nice.
I have to let you know that in the market there are two types of RANGER 757-4 lingering with differences among them being with and without plastic hinges on their control surfaces. The early batches doesn't have any of those plastic parts hinges so you must installed it since the control surface hanging by on a thing piece of flexy foam. Below are must do critical item list of work to do should you received any of the packages both Kit or PNP form.
Must do building list to fix potential flight defects (Very critical/compulsory):
-
If its a PNP package, must replace the stock factory ESC with reliable and quality 30A ESC
-
If its a PNP package, must replace the stock factory servo with Metal Gear Analog/Digital servo.
-
If older batch RANGER 757-4 that doesn't comes with plastic hinges on surface control (Aileron, Elevator and Rudder). Rudder and Elevator must be detached via cutting the thin foam flex line and linked back via attaching pivoted plastic hinges (prefered with pins). Aileron can be reinforce by fibre taping above it for 757-4 early batches.

One of the most obvious (as mentioned earlier) but critical differences between the early batch and the new batch airframe is that the new ones have narrow battery bay because spaces have been taken by 'beefing' up the wall thickness on the nose fuselage while the old one have thin walls which allow bigger inner cavity. Which is why mine can fit bigger and more multiple pack of Li-on cylinder battery side by side than the latest 757-4 models. Check at my RANGER gallery to see both differences.
wall thickness on the nose fuselage while the old one have thin walls which allow bigger inner cavity. Which is why mine can fit bigger and more multiple pack of Li-on cylinder battery side by side than the latest 757-4 models. Check at my RANGER gallery to see both differences.
As for placement of hardwares: Skyzone 5.8ghz 600mw rated video transmitter module located upside down below the belly just behind the landing gear slot and RUNCAM HD F2.8 with video live out-put located upside down below the nose fuselage just few mm after the landing gear slot. APM mini Pro and the FrSky receiver module located on the wooden balsa horizontal place holder exactly below the main wing and the GPS module located below the front leading edge of the wings (just infront of the the most front wing mounting bolt)...far away from the metal wing spar. 3DR radio data telemetry located at the rear tail. BEC, APM power module and ESC located mot bottom flat floor of the fuselage 1cm ~ 3cm away from main CG. The battery placement located on the nose fuselage but occupied only 50% of the overall space on the front close to the main CG (Center Gravity) point.
FPV/UAV building level difficulty/rating: Medium (5/10)
FPV equipment setup grade: Advanced
Building hours required: 48 hours
Skill required: Soldering/Foam cutting and ARDUINO programming for APM based hardware.
Critical issues during installation: Keeping the weight to most minimal.
Required additional mods/must do improvement: Beef up the motor mounting/solid reinforcement + re-glue all control hinges + landing gear + wing reinforcement.

APM parameters lists:
Here's the list of parameters used by UAV Volantex RC RANGER 757-4 build. All the parameters are based on Arduplane V3.4 firmware. Some lines of parameter have been removed because parameters setting such as compass, acc and gyro sensors are very much based on "locality" factor setting which you need to do calibrate it by yourself. So copy the below parameter manually.
*Note:
- Assume you use the same hardware a setup as this build
- Different radio transmitter mode/setup requires different radio channel calibration range/PWM signal and flight mode.
- This parameter optimal for full flying weight approximately 1380gram. Different weight, CG, motor combo power, or different servo performance/throw requires extra tuning.
========================================================
Firmware: ARDUPLANE v3.4 only
========================================================
| ACRO_LOCKING,0 ACRO_PITCH_RATE,180 ACRO_ROLL_RATE,180 AHRS_COMP_BETA,0.1 AHRS_GPS_GAIN,1 AHRS_GPS_MINSATS,6 AHRS_GPS_USE,1 AHRS_ORIENTATION,0 AHRS_RP_P,0.2 AHRS_TRIM_X,-0.001458729 AHRS_TRIM_Y,-0.005462685 AHRS_TRIM_Z,0 AHRS_WIND_MAX,0 AHRS_YAW_P,0.2 ALT_CTRL_ALG,0 ALT_HOLD_FBWCM,0 ALT_HOLD_RTL,10000 ALT_MIX,1 ALT_OFFSET,0 ARMING_CHECK,0 ARMING_REQUIRE,0 ARMING_RUDDER,0 ARSPD_AUTOCAL,0 ARSPD_ENABLE,0 ARSPD_FBW_MAX,21 ARSPD_FBW_MIN,14 ARSPD_OFFSET,904.0641 ARSPD_PIN,0 ARSPD_RATIO,1.9936 ARSPD_SKIP_CAL,0 ARSPD_TUBE_ORDER,2 ARSPD_USE,0 AUTO_FBW_STEER,0 AUTOTUNE_LEVEL,6 BATT_AMP_OFFSET,0 BATT_AMP_PERVOLT,18.0018 BATT_CAPACITY,10500 BATT_CURR_PIN,12 BATT_MONITOR,4 BATT_VOLT_MULT,9.995338 BATT_VOLT_PIN,13 BATT2_AMP_OFFSET,0 BATT2_AMP_PERVOL,17 BATT2_CAPACITY,3300 BATT2_CURR_PIN,12 BATT2_MONITOR,0 BATT2_VOLT_MULT,10.1 BATT2_VOLT_PIN,13 BRD_SERIAL_NUM,0 CAM_DURATION,10 CAM_SERVO_OFF,1100 CAM_SERVO_ON,1300 CAM_TRIGG_DIST,0 CAM_TRIGG_TYPE,0 ELEVON_CH1_REV,0 ELEVON_CH2_REV,0 ELEVON_MIXING,0 ELEVON_OUTPUT,0 ELEVON_REVERSE,0 FBWA_TDRAG_CHAN,0 FBWB_CLIMB_RATE,2 FBWB_ELEV_REV,0 FENCE_ACTION,0 FENCE_AUTOENABLE,0 FENCE_CHANNEL,0 FENCE_MAXALT,0 FENCE_MINALT,0 FENCE_RET_RALLY,0 FENCE_RETALT,0 FENCE_TOTAL,0 FLAP_1_PERCNT,0 FLAP_1_SPEED,0 FLAP_2_PERCNT,0 FLAP_2_SPEED,0 FLAP_IN_CHANNEL,0 FLAP_SLEWRATE,75 FLAPERON_OUTPUT,0 FLTMODE_CH,6 FLTMODE1,11 FLTMODE2,2 FLTMODE3,10 FLTMODE4,12 FLTMODE5,5 FLTMODE6,0 FORMAT_VERSION,13 FS_BATT_MAH,0 FS_BATT_VOLTAGE,9.8 FS_GCS_ENABL,0 FS_LONG_ACTN,0 FS_LONG_TIMEOUT,5 FS_SHORT_ACTN,0 FS_SHORT_TIMEOUT,1.5 GCS_PID_MASK,0 GLIDE_SLOPE_MIN,15 GLIDE_SLOPE_THR,5 GND_ABS_PRESS,50381.18 GND_ALT_OFFSET,0 GND_TEMP,34.02988 |
GPS_GNSS_MODE,0 GPS_MIN_ELEV,-100 GPS_NAVFILTER,8 GPS_SBAS_MODE,2 GPS_TYPE,1 GROUND_STEER_ALT,0 GROUND_STEER_DPS,90 HIL_ERR_LIMIT,5 HIL_SERVOS,0 INITIAL_MODE,0 INVERTEDFLT_CH,0 KFF_RDDRMIX,0 KFF_THR2PTCH,0 LAND_DISARMDELAY,20 LAND_FLAP_PERCNT,0 LAND_FLARE_ALT,3 LAND_FLARE_SEC,2 LAND_PITCH_CD,0 LEVEL_ROLL_LIMIT,5 LIM_PITCH_MAX,2400 LIM_PITCH_MIN,-2800 LIM_ROLL_CD,4500 LOG_BITMASK,0 MAG_ENABLE,1 MIN_GNDSPD_CM,15 MIS_RESTART,0 MIS_TOTAL,22 MIXING_GAIN,0.5 NAV_CONTROLLER,1 NAVL1_DAMPING,0.75 NAVL1_PERIOD,17 PTCH2SRV_D,0.08189169 PTCH2SRV_FF,0 PTCH2SRV_I,0.09286537 PTCH2SRV_IMAX,3000 PTCH2SRV_P,1.091889 PTCH2SRV_RLL,1 PTCH2SRV_RMAX_DN,75 PTCH2SRV_RMAX_UP,75 PTCH2SRV_TCONST,0.45 RALLY_INCL_HOME,0 RALLY_LIMIT_KM,5 RALLY_TOTAL,0 RC1_DZ,30 RC1_MAX,1923 RC1_MIN,1067 RC1_REV,-1 RC1_TRIM,1492 RC10_DZ,0 RC10_FUNCTION,0 RC10_MAX,1900 RC10_MIN,1100 RC10_REV,1 RC10_TRIM,1500 RC11_DZ,0 RC11_FUNCTION,0 RC11_MAX,1900 RC11_MIN,1100 RC11_REV,1 RC11_TRIM,1500 RC2_DZ,30 RC2_MAX,1922 RC2_MIN,1067 RC2_REV,-1 RC2_TRIM,1503 RC3_DZ,30 RC3_MAX,1922 RC3_MIN,1068 RC3_REV,1 RC3_TRIM,1068 RC4_DZ,30 RC4_MAX,1917 RC4_MIN,1068 RC4_REV,1 RC4_TRIM,1490 RC5_DZ,0 RC5_FUNCTION,0 RC5_MAX,1917 RC5_MIN,1067 RC5_REV,1 RC5_TRIM,1069 RC6_DZ,0 RC6_FUNCTION,0 RC6_MAX,1833 RC6_MIN,1068 RC6_REV,1 RC6_TRIM,1832 RC7_DZ,0 RC7_FUNCTION,0 RC7_MAX,1900 RC7_MIN,1100 RC7_REV,1 RC7_TRIM,1498 RC8_DZ,0 RC8_FUNCTION,0 RC8_MAX,1900 RC8_MIN,1100 RC8_REV,1 RC8_TRIM,1498 |
RCMAP_PITCH,2 RCMAP_ROLL,1 RCMAP_THROTTLE,3 RCMAP_YAW,4 RELAY_DEFAULT,0 RELAY_PIN,13 RELAY_PIN2,-1 RELAY_PIN3,-1 RELAY_PIN4,-1 RLL2SRV_D,0.07622135 RLL2SRV_FF,0 RLL2SRV_I,0.0880564 RLL2SRV_IMAX,3000 RLL2SRV_P,1.016285 RLL2SRV_RMAX,75 RLL2SRV_TCONST,0.45 RNGFND_LANDING,0 RSSI_PIN,-1 RSSI_RANGE,5 RST_MISSION_CH,0 RST_SWITCH_CH,0 RTL_AUTOLAND,0 RUDDER_ONLY,0 SCALING_SPEED,15 SCHED_DEBUG,0 SERIAL0_BAUD,115 SERIAL1_BAUD,57 SERIAL1_PROTOCOL,1 SERIAL2_BAUD,57 SERIAL2_PROTOCOL,1 SERIAL3_BAUD,38 SERIAL3_PROTOCOL,5 SERIAL4_BAUD,38 SERIAL4_PROTOCOL,5 SKIP_GYRO_CAL,0 SR0_EXT_STAT,2 SR0_EXTRA1,6 SR0_EXTRA2,6 SR0_EXTRA3,2 SR0_PARAMS,10 SR0_POSITION,2 SR0_RAW_CTRL,2 SR0_RAW_SENS,2 SR0_RC_CHAN,2 SR1_EXT_STAT,1 SR1_EXTRA1,1 SR1_EXTRA2,1 SR1_EXTRA3,1 SR1_PARAMS,10 SR1_POSITION,1 SR1_RAW_CTRL,1 SR1_RAW_SENS,1 SR1_RC_CHAN,1 STAB_PITCH_DOWN,2 STALL_PREVENTION,1 STEER2SRV_D,0.005 STEER2SRV_FF,0 STEER2SRV_I,0.2 STEER2SRV_IMAX,1500 STEER2SRV_MINSPD,1 STEER2SRV_P,1.8 STEER2SRV_TCONST,0.75 STICK_MIXING,1 SYS_NUM_RESETS,300 SYSID_MYGCS,255 SYSID_SW_TYPE,0 SYSID_THISMAV,1 |
TECS_CLMB_MAX,5 TECS_HGT_OMEGA,3 TECS_INTEG_GAIN,0.1 TECS_LAND_ARSPD,-1 TECS_LAND_DAMP,0.5 TECS_LAND_PMAX,10 TECS_LAND_SINK,0.25 TECS_LAND_SPDWGT,1 TECS_LAND_TCONST,2 TECS_LAND_THR,-1 TECS_PITCH_MAX,0 TECS_PITCH_MIN,0 TECS_PTCH_DAMP,0 TECS_RLL2THR,10 TECS_SINK_MAX,5 TECS_SINK_MIN,2 TECS_SPD_OMEGA,2 TECS_SPDWEIGHT,1 TECS_THR_DAMP,0.5 TECS_TIME_CONST,5 TECS_VERT_ACC,7 TELEM_DELAY,0 THR_FAILSAFE,0 THR_FS_VALUE,950 THR_MAX,75 THR_MIN,0 THR_PASS_STAB,0 THR_SLEWRATE,100 THR_SUPP_MAN,0 THROTTLE_NUDGE,1 TKOFF_FLAP_PCNT,0 TKOFF_ROTATE_SPD,0 TKOFF_TDRAG_ELEV,0 TKOFF_TDRAG_SPD1,0 TKOFF_THR_DELAY,2 TKOFF_THR_MAX,0 TKOFF_THR_MINACC,0 TKOFF_THR_MINSPD,0 TKOFF_THR_SLEW,0 TRIM_ARSPD_CM,1550 TRIM_AUTO,0 TRIM_PITCH_CD,0 TRIM_RC_AT_START,1 TRIM_THROTTLE,58 VTAIL_OUTPUT,0 WP_LOITER_RAD,80 WP_MAX_RADIUS,0 WP_RADIUS,80 YAW2SRV_DAMP,0 YAW2SRV_IMAX,1500 YAW2SRV_INT,0 YAW2SRV_RLL,1 YAW2SRV_SLIP,0 |
========================================================

UAV flight characteristic and performance
Having own several bigger FPV/UAV platform flown in the pass namely 1400mm Sky Surfer, 1600mm Victor(aka XUAV) Sky Surfer/Bixler and 1300 Mini Sky  hunter this RANGER is most platform for long range flight due to several characteristic which trumps the above mentioned models. These are key winning factor to why it flew better than above:
hunter this RANGER is most platform for long range flight due to several characteristic which trumps the above mentioned models. These are key winning factor to why it flew better than above:
-
Able to flew slow and hover without stalling when at leveled flight.
-
Responsive control, fast maneuver, aerobatics and quick 'bail out' from possible stall. (However can be too handful to control for first timer/beginners)
-
Flew fast when riding with tail wind.
-
Can fly better without rudder authority (APM Ardupilot @ Arduplane 'bank and yank' control).
-
Flew stable even with extra loading capacity compare to average glider type FPV/UAV platform. My RANGER on 10500mah 3s3p Li-On.
There are few thing worth noted that RANGER seems to be twitchy during altitude climbing and descending anything passes 2 degree of nose plane go tilt into altitude ascending/descending which is why in the video the plane wiggle a lot when climbing to avoid mountain or descending down below the hill, valley or even in the open ocean with mild wind. But when in linear flight it stay stable and flew nicely smooth. If you watched all my UAV and FPV video on my Youtube Channel you will notice the RANGER overall most twitchy plane to fly both manually and auto.....might not be a good aerial videographer unless it carry heavy camera gimbal to stabilized the video recordings but that setup not going to happen on this 1380mm only plane. On LT2212 1400KV + APC 8"x4 prop + 35A the right cruise throttle is at 58% with 48~58 cruise speed consume only 6.8~7.1 A (current amp.) average making it the best setup for long range flight and consume low power. Full throttle at 95% consume 17A max. you can watch all the video which already include telemetry that shows real-time consumption of power for each flight. Being able to hover with minimal wind doesn't not means its the best plane to fly on any occasion...for example on my 2nd RANGER video which flew into moderate windy evening that came from the sea onto land the RANGER took too long to cover few kilometers forward compare with UAV/FPV Drifter Ultralight or my other FPV scale plane of the
anything passes 2 degree of nose plane go tilt into altitude ascending/descending which is why in the video the plane wiggle a lot when climbing to avoid mountain or descending down below the hill, valley or even in the open ocean with mild wind. But when in linear flight it stay stable and flew nicely smooth. If you watched all my UAV and FPV video on my Youtube Channel you will notice the RANGER overall most twitchy plane to fly both manually and auto.....might not be a good aerial videographer unless it carry heavy camera gimbal to stabilized the video recordings but that setup not going to happen on this 1380mm only plane. On LT2212 1400KV + APC 8"x4 prop + 35A the right cruise throttle is at 58% with 48~58 cruise speed consume only 6.8~7.1 A (current amp.) average making it the best setup for long range flight and consume low power. Full throttle at 95% consume 17A max. you can watch all the video which already include telemetry that shows real-time consumption of power for each flight. Being able to hover with minimal wind doesn't not means its the best plane to fly on any occasion...for example on my 2nd RANGER video which flew into moderate windy evening that came from the sea onto land the RANGER took too long to cover few kilometers forward compare with UAV/FPV Drifter Ultralight or my other FPV scale plane of the 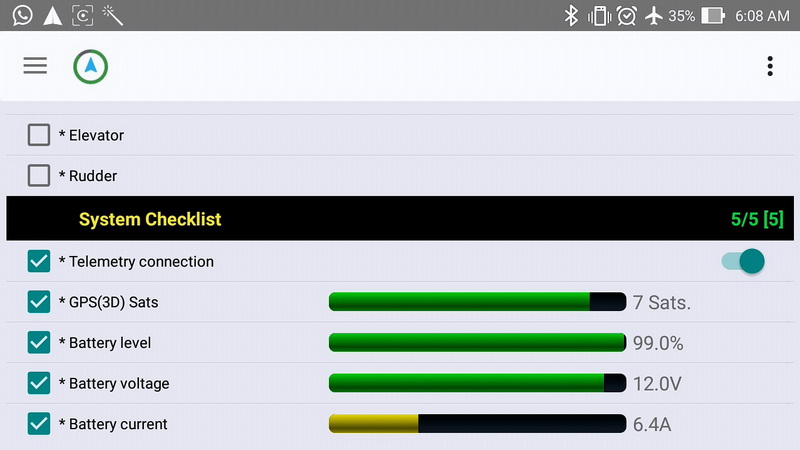 same amount of power and thrust required to break away from head wind. RANGER almost flew stationary going almost down to 29km/h which is not good for long range endurance flight per-battery pack required. Hovering is bad!...wasted useful amount of power doing stationary! There are two video of best comparison to explain RANGER performance with and without wind based on two of these videos (Windy = 36km video vs Windless = 42.3km video.) Both shown flew almost the same time duration but for 36km mission it took more power per-distance under windy condition cover shorter range than the 42.3km with less time and power to spare. Its proven RANGER isn't really good under windy days which is why most mission flight on my RANGER best flown early in the morning exactly when the sun begin to rise before thermal started to generate in-land. The only PROS why RANGER was much preferred for longer range autonomous mission because its max capacity able to carry more heavier battery packs to cover distance required to roam as its internal cavity are more roomier and well ventilated to cool down all the hot wired hardware for long range journey. The second consideration into long range is about the overall stability which guarantee zero 'tumble/roll over' effect on the airframe when
same amount of power and thrust required to break away from head wind. RANGER almost flew stationary going almost down to 29km/h which is not good for long range endurance flight per-battery pack required. Hovering is bad!...wasted useful amount of power doing stationary! There are two video of best comparison to explain RANGER performance with and without wind based on two of these videos (Windy = 36km video vs Windless = 42.3km video.) Both shown flew almost the same time duration but for 36km mission it took more power per-distance under windy condition cover shorter range than the 42.3km with less time and power to spare. Its proven RANGER isn't really good under windy days which is why most mission flight on my RANGER best flown early in the morning exactly when the sun begin to rise before thermal started to generate in-land. The only PROS why RANGER was much preferred for longer range autonomous mission because its max capacity able to carry more heavier battery packs to cover distance required to roam as its internal cavity are more roomier and well ventilated to cool down all the hot wired hardware for long range journey. The second consideration into long range is about the overall stability which guarantee zero 'tumble/roll over' effect on the airframe when  hit by side wind. Just like 'ES Drifter Ultralight' which have "clock pendulum" like center gravity which its main weight located far away downwards from the main wing, the gravity pulls the bottom fuselage towards earth allowing straight and stable flight throughout the journey. The airframe also less likely to "yaw" towards the headwind "crabbing" sideways should it encounter heavy wind on different direction where much happens a lot on typical glider plane eg: SKY SURFER/BIXLER and AXN Cloud Fly or anything with di-hedral wings. However if RANGER loses airspeed where throttle below recommended cruise speed it will yaw towards the headwind and wobble!. Taking off from the ground seems to be no problem but it does take twice longer runway to take off compare to other fixed wing drone i flown before. For landing it will takes twice amount of distance required when compare to take-off distance because this plane took sweet time hovering in the air before decided to touch down even if throttle been cut-off 5 seconds in advance. Landing gear also quite tall probably designed to house a bigger camera with gimbal between its leg but at the same time it has higher chances to tip over due to length of inertia force to pivot the fuselage into nose tip over into the ground just like what happen on several video when landed on soft pit ground.
hit by side wind. Just like 'ES Drifter Ultralight' which have "clock pendulum" like center gravity which its main weight located far away downwards from the main wing, the gravity pulls the bottom fuselage towards earth allowing straight and stable flight throughout the journey. The airframe also less likely to "yaw" towards the headwind "crabbing" sideways should it encounter heavy wind on different direction where much happens a lot on typical glider plane eg: SKY SURFER/BIXLER and AXN Cloud Fly or anything with di-hedral wings. However if RANGER loses airspeed where throttle below recommended cruise speed it will yaw towards the headwind and wobble!. Taking off from the ground seems to be no problem but it does take twice longer runway to take off compare to other fixed wing drone i flown before. For landing it will takes twice amount of distance required when compare to take-off distance because this plane took sweet time hovering in the air before decided to touch down even if throttle been cut-off 5 seconds in advance. Landing gear also quite tall probably designed to house a bigger camera with gimbal between its leg but at the same time it has higher chances to tip over due to length of inertia force to pivot the fuselage into nose tip over into the ground just like what happen on several video when landed on soft pit ground.
 Minimum level of VLOS flight experience required/flight-hours: Advance(580 hour)
Minimum level of VLOS flight experience required/flight-hours: Advance(580 hour)
Minimum level of basic UAV flight experience required/flight-hours: Intermediate (300 hour)
Nature of platform handling experience/skill required: Glider, scale and acrobatic flight
Self leveling capability in thumbs-off stick situation: No
Take-off & landing difficulty: Medium
Hand launch: No
Max speed: 80~km/h
Cruise speed: 48~53km/h
Min speed before stall (with zero wind): 34km/h
Cruise throttle power consumption (A): 6.5A = 56km/h (@58 throttle)
FPV flight/radius: Unlimited (given above UAV spec/setup)
Max altitude: -
Bail-out/fail safe recovery altitude limit: 10~30m
UAV safe distance range for testing: 700~900m (Open field)
High angle of attack (AOA) tolerance limit before stall: 28~30 degree.
Max bank angle at cruise speed 58km/h: 48 degree.
Ground take-off and landing thrust%: Takeoff 25m (80%)/ Landing 40m (20%)
Altitude climbing power/thrust%/AOA angle: 1 sec/per-meter at 53% thrust/20 degree
360 degree turning radius clearance/holding pattern/loiter: 40~80m
360 barrel roll/loop acro flight: Medium (Aerobatic)
Control expo - aileron: 50% (low to high)
Control expo - elevator: 50% (low to high)
Control expo - rudder: 45% (low to high)
Control end point - aileron: 65% (low to high)
Control end point - elevator: 90% (low to high)
Control end point - rudder: 100% (low to high)
Flight time: 55 ~ 80 min
Ground spotter visibility (LOS): 600~700m
Ground spotter audible noise (LOS): 200~300m
Safety issue
Many RANGER 757-4 owner (at Rcgroups.com forum) complained about down thrust issues when  full throttle on their plane which causes the plane to dive suddenly at throttle, so they ended up making mods to make the motor angle pointed slightly higher to resolve the problem. On contrary and surprisingly i haven't encounter such mention problem yet as i flew it as stock manufacturer default motor angle, mine flew straight line and it felt like flying bigger version of Drifter Ultralight...nice. However my buddy of mine have the same issues, upon inspection i do notice that there are differences between my RANGER and my buddies
full throttle on their plane which causes the plane to dive suddenly at throttle, so they ended up making mods to make the motor angle pointed slightly higher to resolve the problem. On contrary and surprisingly i haven't encounter such mention problem yet as i flew it as stock manufacturer default motor angle, mine flew straight line and it felt like flying bigger version of Drifter Ultralight...nice. However my buddy of mine have the same issues, upon inspection i do notice that there are differences between my RANGER and my buddies  RANGER which is more on CG issues. The fact about RANGER is that its a CG sensitive plane, a slight error around 45~50gram on the nose weight displacement can throw the plane flight characteristic into disarray. Majority main causes usually how the battery was placed. On my RANGER, the battery placement located on the nose fuselage but occupied only 50% of the overall space on the front close to the main CG (Center Gravity) point. If to be use more than 50%~100% of total front space away from CG the plane will nose tip over during take-off and landing and also causes the plane to lunge downwards during full throttle as reported by owner of RANGER 757-4 at Rcroups.com forum. I discovered this problem when me and my buddy experimented with weight distribution on the nose which have major affect how the plane flew. Never put anything more than 45gram on the most front nose. Placing overall weight of the hardware closest to the CG point will more likely to solve erratic flight characteristic during full throttle.
RANGER which is more on CG issues. The fact about RANGER is that its a CG sensitive plane, a slight error around 45~50gram on the nose weight displacement can throw the plane flight characteristic into disarray. Majority main causes usually how the battery was placed. On my RANGER, the battery placement located on the nose fuselage but occupied only 50% of the overall space on the front close to the main CG (Center Gravity) point. If to be use more than 50%~100% of total front space away from CG the plane will nose tip over during take-off and landing and also causes the plane to lunge downwards during full throttle as reported by owner of RANGER 757-4 at Rcroups.com forum. I discovered this problem when me and my buddy experimented with weight distribution on the nose which have major affect how the plane flew. Never put anything more than 45gram on the most front nose. Placing overall weight of the hardware closest to the CG point will more likely to solve erratic flight characteristic during full throttle.

Pros and Cons
Here are list of Pros and Cons on RANGER 757-4 listed below which already equipped with APM for autonomous UAV sepc:
Pros:
- No need full control/ relax on control since plane flying automatically based on user's pre-loaded mission/waypoint (APM driven).
- Good long range low altitude flight.
- Less FPV hardware setup used mainly for monitoring its arrival.
- Bigger cavity to stuff in all the hardware required and place holder already prepared by default from factory.
- Plane can be easily totally disassemble by unscrew all the Philips screw bolts and fit inside a small hand carry size rectangular box for portable transport.
Cons:
- Very handling twitchy for beginners.

- Can be slightly frustrating for beginners to setup UAV and FPV setup on this plane because of weight distribution issues that linked to CG and down thrust problem.
- Take longer runway to land even after throttle cut.
- Ultimately CG sensitive fuselage, a good weight distribution management is main contributor to the stability of RANGER flight characteristic. Never overweight the front nose or use up 50% of the remaining front most spaces.
- Longer learning curve to setup autonomous system and extra programming knowledge in ARDUINO code for APM hardware.

Current status & flight history
Amazingly this platform raise to fame quicker than Drifter Ultralight in term of achieving long distance flight range and longer battery stamina especially  ability to be flown on packs of 10500mah 3s3p Li-On (LG MJ1 18650 3500mah) in short period of time just a month after i was build. First phase of its two mission was on Li-po, the third and beyond started to use custom Li-On packs. The reason Li-On was preferred on this plane because of of the power capacity per-weight advantages over weight of Li-Po pack (which is heavier by power ratio offered. For example a pack of Li-Po 5200mah 3s1p 35~40C weighted about 430gram while a custom build Li-On pack at 10500mah 3s3p 10C weight about 480~490gram. So Li-On packs is almost twice lighter than 2x lipo combine to make up with the power capacity and also RANGER only needs around 6.8~7.5A constant amp consumption for long autonomous trip with short burst (10sec) of average 9~11A power consumption during take-off. LG MJ1 18650 Li-on also have an advantage to drain up to min 2.6v per-cell (slow drain to 7.8V) limit than Li-Po on recommended 3.3V (9.9V) voltage drainage per-cell, so this take advantage of longer flight time over voltage drain. Total flight weight on final setup on its 3rd mission with new Li-On pack installed is 1.38kg which i consider is a good weight to keep the CG hold downwards via gravity (which helps the plane flew upright leveled), no to light to be shaken off by the wind and not too heavy for overall thrust power from the motors. The plane already flew more than 11 mission in one month after its birth and so far had no
ability to be flown on packs of 10500mah 3s3p Li-On (LG MJ1 18650 3500mah) in short period of time just a month after i was build. First phase of its two mission was on Li-po, the third and beyond started to use custom Li-On packs. The reason Li-On was preferred on this plane because of of the power capacity per-weight advantages over weight of Li-Po pack (which is heavier by power ratio offered. For example a pack of Li-Po 5200mah 3s1p 35~40C weighted about 430gram while a custom build Li-On pack at 10500mah 3s3p 10C weight about 480~490gram. So Li-On packs is almost twice lighter than 2x lipo combine to make up with the power capacity and also RANGER only needs around 6.8~7.5A constant amp consumption for long autonomous trip with short burst (10sec) of average 9~11A power consumption during take-off. LG MJ1 18650 Li-on also have an advantage to drain up to min 2.6v per-cell (slow drain to 7.8V) limit than Li-Po on recommended 3.3V (9.9V) voltage drainage per-cell, so this take advantage of longer flight time over voltage drain. Total flight weight on final setup on its 3rd mission with new Li-On pack installed is 1.38kg which i consider is a good weight to keep the CG hold downwards via gravity (which helps the plane flew upright leveled), no to light to be shaken off by the wind and not too heavy for overall thrust power from the motors. The plane already flew more than 11 mission in one month after its birth and so far had no  unwanted incident such as stall or technical break down either..everything went smooth. The plane was constantly monitored via telemetry as it flew to ensure everything went before i sent it of for longer range flight beyond 40~50km standalone radio independent flight. The RANGER equipped with APM Mini Pro which is the core flight of autonomous mission, i had 100% trust of its capability since it was proven in various of my past UAV platform flown on UAV Drifter Ultralight #2 and #3. (The number one still on ARKBIRD though which is not an autonomous capable). This APM fitted with ARDUPLANE V3.4 firmware which perform perfectly on all my plane. The reason why APM Mini Pro was my preferred choice other being small factor in size was the improve onboard 5V power regulator to supply reliable power to overall component on the Adrupilot's processing power, sensors, compass and GPS....stay away from cheappy 2.6 APM boards cause i encounter from built in regulator that fails at random times. 2.5 boards?...don't trust the internal compass...never! user external ones. On board also comes with Neo-7N GPS locks in constant 13~15 satelite full 3D lock which ensure accurate flight path with almost 1~2 meter of margin error. If you do notice on its 3rd mission and beyond this RANGER no longer equipped with MinimOSD module which provide layers of data into FPV video layout because it has problem sync up with onboard radio telemetry module which causes random video blackout which i couldn't solve for now. But since Radio data telemetry offer more info to display on my smart devices and also distance
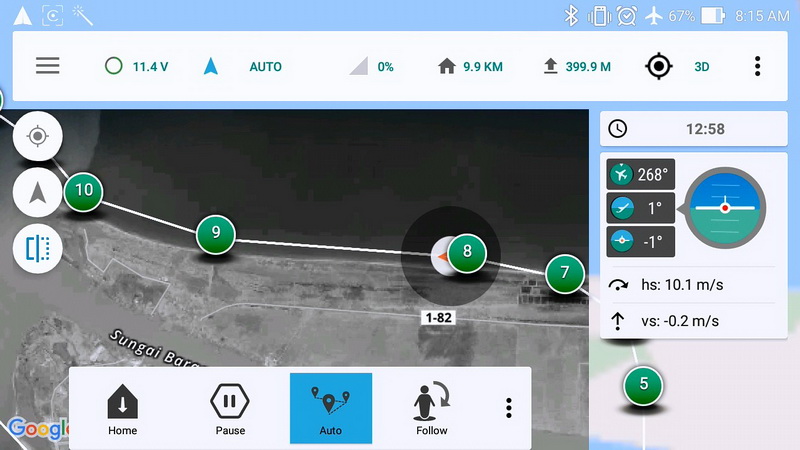
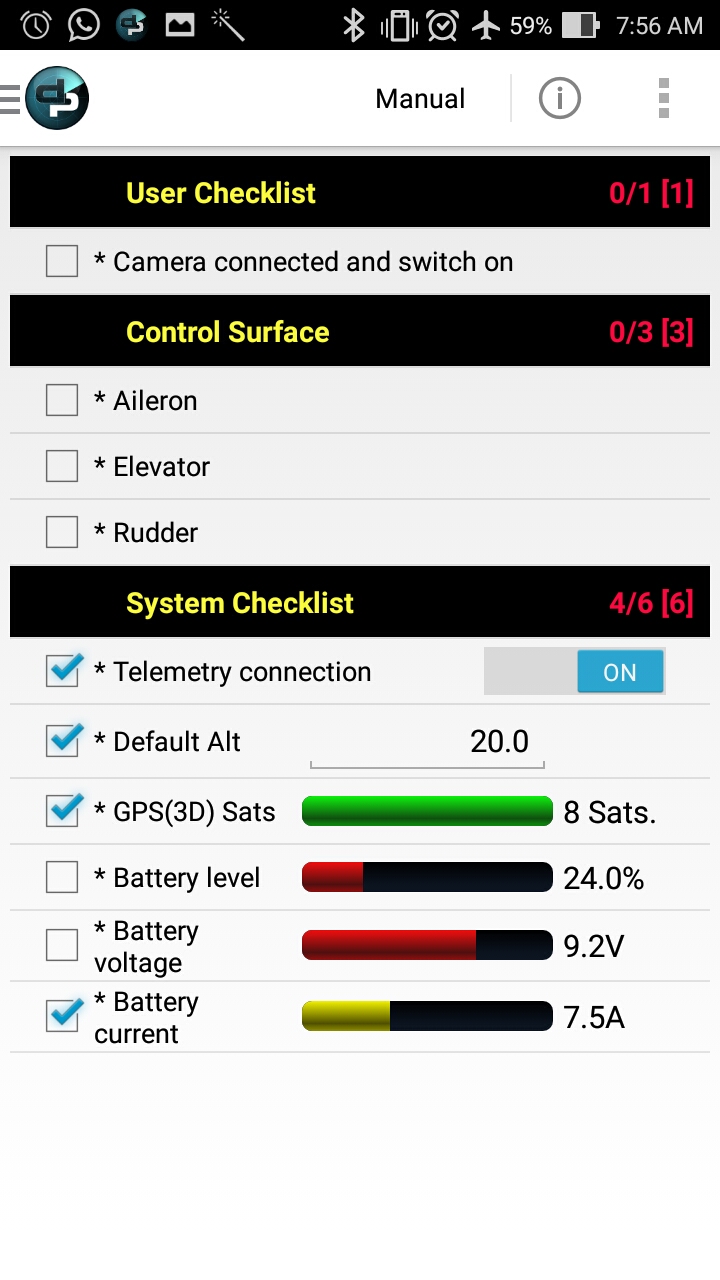
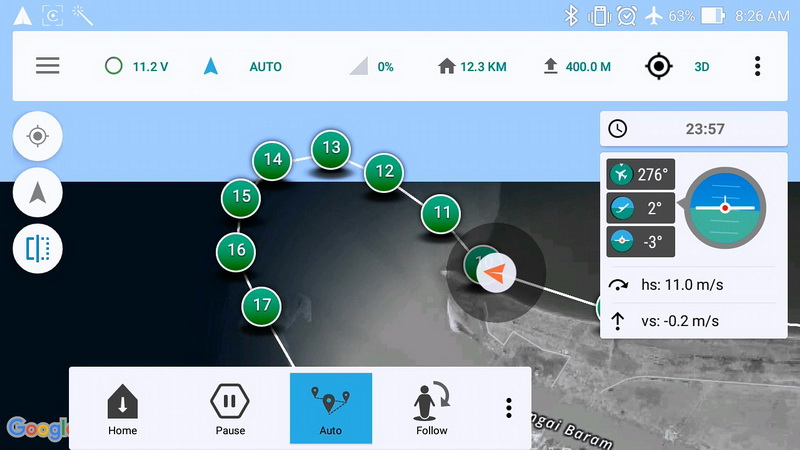
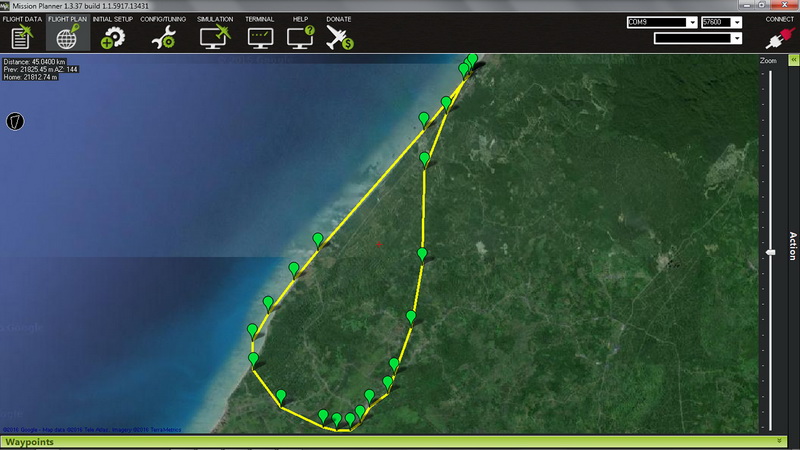
unwanted incident such as stall or technical break down either..everything went smooth. The plane was constantly monitored via telemetry as it flew to ensure everything went before i sent it of for longer range flight beyond 40~50km standalone radio independent flight. The RANGER equipped with APM Mini Pro which is the core flight of autonomous mission, i had 100% trust of its capability since it was proven in various of my past UAV platform flown on UAV Drifter Ultralight #2 and #3. (The number one still on ARKBIRD though which is not an autonomous capable). This APM fitted with ARDUPLANE V3.4 firmware which perform perfectly on all my plane. The reason why APM Mini Pro was my preferred choice other being small factor in size was the improve onboard 5V power regulator to supply reliable power to overall component on the Adrupilot's processing power, sensors, compass and GPS....stay away from cheappy 2.6 APM boards cause i encounter from built in regulator that fails at random times. 2.5 boards?...don't trust the internal compass...never! user external ones. On board also comes with Neo-7N GPS locks in constant 13~15 satelite full 3D lock which ensure accurate flight path with almost 1~2 meter of margin error. If you do notice on its 3rd mission and beyond this RANGER no longer equipped with MinimOSD module which provide layers of data into FPV video layout because it has problem sync up with onboard radio telemetry module which causes random video blackout which i couldn't solve for now. But since Radio data telemetry offer more info to display on my smart devices and also distance  coverage transmission than on 5.8ghz video layout on OSD. So i decided to remove it for the sake of reducing weight, remove redundancy and also safer because MinimOSD prone to overheating, wasting current (A) and avoid possible "ArduCam" reboot during flight (who knows but it happens in the past did cave in my car roof FYI). Everything on my RANGER have more simplified and minimal setup compared to all my present UAV/FPV spec fixed wing drone, adding advantages for less parts to breakdown or malfunction during flight which explain more cheaper cost to build. As by 23 May 2016 max trip range flown was 50.5km with 39% juices of Li-On power left in the tank, could have flown another extra +5km on beautiful morning with overall flight altitude of 150~200m around hills, valleys, forest and coastal area. Expected to see more positive flight progress on this plane in the future since its already flown perfectly well throughout its past flight. The procedure to start 'a day of flight' flight my UAV RANGER is pretty simple: Turn on the TX radio and 3DR ground station tripod, Plug in the battery to start the plane, turn on Mission Planner on notebook or 3DR Tower on my android phone to connect wireless link to plane via 3DR ground station to load the mission parameter, manual take-off or auto take-off, flick the "AUTO" switch to start the mission, wait for few minutes or hour to complete the mission (wait inside the car for refreshing air-cond at the back seat), Then notebook/smartphone rings the completion of mission and arrival of plane few kilometers away, manually or auto landing and then pack ready to go home....simple as that. In my FPV days its all about tanning under the hot sun...things changed.
coverage transmission than on 5.8ghz video layout on OSD. So i decided to remove it for the sake of reducing weight, remove redundancy and also safer because MinimOSD prone to overheating, wasting current (A) and avoid possible "ArduCam" reboot during flight (who knows but it happens in the past did cave in my car roof FYI). Everything on my RANGER have more simplified and minimal setup compared to all my present UAV/FPV spec fixed wing drone, adding advantages for less parts to breakdown or malfunction during flight which explain more cheaper cost to build. As by 23 May 2016 max trip range flown was 50.5km with 39% juices of Li-On power left in the tank, could have flown another extra +5km on beautiful morning with overall flight altitude of 150~200m around hills, valleys, forest and coastal area. Expected to see more positive flight progress on this plane in the future since its already flown perfectly well throughout its past flight. The procedure to start 'a day of flight' flight my UAV RANGER is pretty simple: Turn on the TX radio and 3DR ground station tripod, Plug in the battery to start the plane, turn on Mission Planner on notebook or 3DR Tower on my android phone to connect wireless link to plane via 3DR ground station to load the mission parameter, manual take-off or auto take-off, flick the "AUTO" switch to start the mission, wait for few minutes or hour to complete the mission (wait inside the car for refreshing air-cond at the back seat), Then notebook/smartphone rings the completion of mission and arrival of plane few kilometers away, manually or auto landing and then pack ready to go home....simple as that. In my FPV days its all about tanning under the hot sun...things changed.
 Lifespan operation: month (since 15 April 2016)
Lifespan operation: month (since 15 April 2016)
Start operation: mid 2016
Maintenance priority check: None
Constant critical issue: None
Maintenance cost per-lifespan: None
Flight hours accumulated per-lifespan on (Full UAV): 7 hours (updated on 20 May 2016)
Best L.O.S distance record : 22km (updated on 20 May 2015)
Best trip distance per-session : 45km (updated on 20 May 2015)
Est. distance covered per-lifespan: ~400km (Odo) (updated on 20 May 2016)
Best height record: -
BBest flight time record per-session: 60min (Li-on MJ1 10,500mah 3s3p) *Ground test indicates 80min down to 9.4v where limit is 7.8v
Activity status:/em> Still active.

Autonomous flight feature:
This RANGER did pretty much the same capability as the previous APM Arduplane driven UAV Drifter mention in the article days ago. This is repeated statement because both have the same feature except for endurance. "We'll there lots of things this plane can do to make pilot life easier, means you almost don't need to touch your radio controller to make the plane move or do the work...everything is robotics written all over the plane. But to keep the words simple below are the list of thing that this plane does...what i listed is something that was already tested but i just tap 50% of its current potential. I will discover the remaining 50% soon"......yeah same old same stuff:
 Autonomous flight/ Waypoint flight: Yes, no hands flight. It flew by itself. I can also do auto take-off and landing too.
Autonomous flight/ Waypoint flight: Yes, no hands flight. It flew by itself. I can also do auto take-off and landing too.- Follow me: You seen it before....something you saw on my multicopter project video but i don't use it much.
- Touch to fly: I you have a gamepad you can use to fly it instead of using your aircraft radio controller else just point on your smart devices touch screen to command your flight.
- Grid flight for aerial or 3D mapping (Geospatial) flight: I think you saw 2x samples i made on my Youtube channel.
- ROI inspection flight (Region Of Interest): Just point that area you want to explore or do aerial inspection with gimbal camera and the plane do its magical works capture the ground object in all angle.
- Servo trigger type mission: Something that trigger servo movement like dropping payload or activate camera, suitable for parcel delivery services on drones where it can land drop the package or touch 'n' go drop something that Google, Amazon and DHL drone are experimenting at the time of my writings.....yet to discover..to be continue... Open source are cool!

To make all this automation possible a ground computing device needed to communicate 2 ways and send command to the plane. These are:
- Ground telemetry data USB module (3DR radio data telemetry): Radio receiver/transmitter used to connect to smart devices such as smartphone or notebook.via USB. Usually this module mounted over camera tripod for good radio height dispersion.
- Smartphone (Android), tablet or notebook: Needed 3DR/APM Mission planner (Tower or Droid Planner for Android phones/tablet) software as user interface to link/interact with the UAV aircraft model via Radio telemetry USB port
- (*Optional) A gamepad or joystick devices: To connect to computing devices for extra manual control if needed instead of using aircraft model radio controller.
To sum up everything above, the pilot does nothing just sit down, relax and watch the show. Almost the same thing what military grade drone do i guess.

Latest Log:
(updated: 2/5/2016)
- The RANGER 757-4 no longer using 5200mah 3s 35C Li-Po pack, now adopting Li-On cell technology the "LG MJ1 18650 Battery Review (3500mAh)" because of the advantage of more capacity per-weight for longer flight time on constant low Ampere throttle power consumption. Build as 10,500mah 3s3p to be used below 8A constant cruise throttle. Was proven as shown on the attached video on this page. The details on the Li-On battery specification can be found here: https://batterybro.com/blogs/18650-wholesale-battery-reviews/40773059-new-lg-mj1-18650-battery-review-3500mah

Summary
The RANGER 757-4 surprise me in many ways because i didn't put much high expectation when i first bought it and convert into full UAV system. Month  into flying with many experimental changes made this plane a remarkable aircraft to fly as autonomous platform. With the size, the pricing and the ease of installation hand pick hardware setting up the plane its the most easy to build platform i every own because i think the manufacturer figured it out what consumer expected when it comes to mods the plane into a long range drone. In just a month the plane flew numerous of flawless autonomous mission flight throughout the various parts of the land and water taking breath taking HD footages from urban to beautiful remote rural country side alone with zero radio contact all depended on its robotics way of flying. Remarkably it uses Li-On pack instead of Li-po which busting urban myth and taboo about using Li-on cell on planes. However, this RANGER does not play well with the wind due to it characteristic like to hover almost stationary or slow down during headwind which can be catastrophic for unmanned autonomous flight as if it was flown with flaps like...which explained why most of my RANGER mission flown very early in the morning where wind are still calm and thermal is low. Still its still the best platform to fly longer distance
into flying with many experimental changes made this plane a remarkable aircraft to fly as autonomous platform. With the size, the pricing and the ease of installation hand pick hardware setting up the plane its the most easy to build platform i every own because i think the manufacturer figured it out what consumer expected when it comes to mods the plane into a long range drone. In just a month the plane flew numerous of flawless autonomous mission flight throughout the various parts of the land and water taking breath taking HD footages from urban to beautiful remote rural country side alone with zero radio contact all depended on its robotics way of flying. Remarkably it uses Li-On pack instead of Li-po which busting urban myth and taboo about using Li-on cell on planes. However, this RANGER does not play well with the wind due to it characteristic like to hover almost stationary or slow down during headwind which can be catastrophic for unmanned autonomous flight as if it was flown with flaps like...which explained why most of my RANGER mission flown very early in the morning where wind are still calm and thermal is low. Still its still the best platform to fly longer distance at the moment unless i can find ways to make my current UAV Drifter Ultralight #3 V5 to be more power efficient since its battery load weight carrying capacity capped at 5200mah 3s. For now RANGER will stay slightly longer on its flight roster followed by Drifter as second in command. So here's the big question they everyone wanted to ask me about, "Is RANGER 757-4 is a good fix wing platform for beginners into UAV or FPV setup?". If you're total beginners going your first plane or your first FPV or UAV setup then a big NO to this plane. Why because based on the forum links that i provided down the page (Rcgroups.com discussion group on RANGER 757-4) this plane even though marketed as easy to fly plane was infact hard to fly plane if 'improperly' setup
at the moment unless i can find ways to make my current UAV Drifter Ultralight #3 V5 to be more power efficient since its battery load weight carrying capacity capped at 5200mah 3s. For now RANGER will stay slightly longer on its flight roster followed by Drifter as second in command. So here's the big question they everyone wanted to ask me about, "Is RANGER 757-4 is a good fix wing platform for beginners into UAV or FPV setup?". If you're total beginners going your first plane or your first FPV or UAV setup then a big NO to this plane. Why because based on the forum links that i provided down the page (Rcgroups.com discussion group on RANGER 757-4) this plane even though marketed as easy to fly plane was infact hard to fly plane if 'improperly' setup  due to sensitive CG and weight distribution especially when loaded with your FPV or UAV gear. 60% people reported crashed on their maiden flight. 40% have right yaw during take-off, 70% people have down thrust problem causing the plane dunked down at throttle and 40% have problem with weight. I've you're an observant people you will wonder why in some part of my photo gallery my buddy RANGER seems to be soaked wet...you'll know why. Fortunately if you do crash the plane is extremely durable because the EPO foam it was made of seems to be very elastic like sturdy car bumper. I did slightly crash due to right yaw problem on its first maiden slammed into trees but still no sign of dent or crack, good foam....probably why it was misled for beginners platform. One more thing..its a very twitch plane, it glides but overall surface control make you're self pretty handful when controlling this plane. If you're a beginners go for Bixler or a Sky Surfer but if you're Pro or seasonal FPV or UAV builder the RANGER is a golden ticket for long range flight. at 1380mm its a great for back seat sedan weekend UAV plane.
due to sensitive CG and weight distribution especially when loaded with your FPV or UAV gear. 60% people reported crashed on their maiden flight. 40% have right yaw during take-off, 70% people have down thrust problem causing the plane dunked down at throttle and 40% have problem with weight. I've you're an observant people you will wonder why in some part of my photo gallery my buddy RANGER seems to be soaked wet...you'll know why. Fortunately if you do crash the plane is extremely durable because the EPO foam it was made of seems to be very elastic like sturdy car bumper. I did slightly crash due to right yaw problem on its first maiden slammed into trees but still no sign of dent or crack, good foam....probably why it was misled for beginners platform. One more thing..its a very twitch plane, it glides but overall surface control make you're self pretty handful when controlling this plane. If you're a beginners go for Bixler or a Sky Surfer but if you're Pro or seasonal FPV or UAV builder the RANGER is a golden ticket for long range flight. at 1380mm its a great for back seat sedan weekend UAV plane.

Videos/Medias![]() Here are some of my video and gallery related to the above topics:
Here are some of my video and gallery related to the above topics:
- Gallery: UAV - Volantex RC: RANGER - 1380mm
- My Youtube channel: 3DXL
- My Videos:
- 55.1km Wild wind - UAV Volantex RANGER 757-4 using Li-On (LG MJ1 18650)
- 50.5km Forest Detour - UAV Volantex RANGER 757-4 using Li-On (LG MJ1 18650)
- 45km Cross Country - UAV Volantex RANGER 757-4 using Li-On (LG MJ1 18650)
- 42.3km Off the Grid - UAV Volantex RANGER 757-4 using Li-On (LG MJ1 18650)
- 36km Delta Shoreline - UAV Volantex RANGER 757-4 using Li-On (LG MJ1 18650)
- 19km Misty mission - UAV Volantex RANGER 757-4
- 10km Trial Run - UAV Volantex RANGER 757-4
- UAV Volantex RANGER 757-4 - Field test
Shopping list
Here i've listed some raw material, hardware and stuff where you can start building your own UAV autonomous platform. The list contain the above hardware and also include some compatible ones which you can pickup what suits best for your need and your budget. So come dig around and start your autonomous flying ambition:
** Take note the one with marked (*) is the default hardware i use on my setup while the non ones are compatibles.
- Platform/Airframe:
- Radio set/combo:
- ESC:
- BEC:
- Servo:
- Camera (FPV):
- Secondary HD camera:
- Flight controller (APM/Pixhawk series):
- OSD module (APM/Pixhawk compatible but my RANGER no longer using it):
- Radio data telemetry unit (APM/Pixhawk series): Ground station unit (Android/tablet/smartphone):
- Video transmitter:
- *Skyzone Upgrade TS5828S 40CH 5.8G 600MW RP-SMA Female FPV Transmitter
- Skyzone Upgrade TS5823S 40CH 5.8G 200MW AV Transmitter Module RP-SMA Female
- Skyzone TS58400 5.8G 400mW 32CH AV Transmitter Module
- Boscam FPV 5.8G 200mW AV Wireless Transmitter TS351
- Boscam FT953 5.8G 400mw 32CH Mini FPV AV Transmitter
- Video receiver/FPV LCD/FPV video goggle:
- *Boscam GS923 FPV 5.8G 32CH Div AIO Wireless Video Glasses Without DVR
- Fatshark Dominator V3 FPV Video Goggles Glasses WVGA 720p HDMI 800X480
- Fatshark Fat Shark Dominator HD V2 FPV Goggles Video Glasses Headset
- Skyzone SKY02 SKY02S V3 5.8G 40CH AIO 3D FPV Goggles Only Video Glasses Headset
- Skyzone V2 5.8G 40CH FPV Goggles With Raceband Video Glasses Headset
- Skyzone SKY-700D FPV 5.8G 32CH Diversity 7 Inch TFT Monitor DVR
- Skyzone HD02 40CH 5.8G 7 Inch 1024x600 HD FPV Monitor HDMI With/Without DVR Build in Battery
- Battery:
- *1PC Keeppower LG Chem INR 18650 MJ1 10A 3.6V 3500mAh Battery (I use this to build me 10,500mah 3s3p DIY pack, expert and skills build needed )
- ZIPPY Compact 5000mAh 3S 25C Lipo Pack
- ZIPPY Flightmax 5000mAh 3S1P 25C

Building threads/Referral
If you don't know where to begin with i recommend you to start reading some guides, wikis and building tips from popular on-line resources as listed below. You might find me wondering around some popular R/C and FPV/UAV forum below.
- Rcgroups.com forum: VolantexRC Mini Ranger 1.4m PNP - full review and build log
- Rcgroups.com forum: Volantex Ranger 757-4 - Unboxing & Review
- Rcgroups.com forum: Mini Volantex Ranger 1380mm
- Rcgroups.com forum: Volantex Ranger 757-4 FPV 1380mm Plane Unboxed
- Rcgroups FPV forum
- http://www.diydrones.com
- http://www.rcexplorer.se
- 3DR/APM Ardupilot - Arduplane manual
- 3DR/APM Ardupilot - MinimOSD installation guide
- 3DR/APM Ardupilot - Configuring telemetry
- MinimOSD Extra firmware and tools
- Ardupilot - Plane resources
- 3DR APM mission planner software overview
- 3DR APM Ardupilot download center
- 3DR tower apps for Android. (GooglePlay)
- Droid Planner 2 apps Android. (GooglePlay)
- Droid Planner apps Android. (GooglePlay)
- LG MJ1 18650 Battery Review (3500mAh)
