
About
I'm sure most of you've have seen video of my fixed wing UAV flight ranging various type of models from previous years to current ones, you might notice that all of my flight have consistent flight pattern where my UAV plane first have to perform close range or localized waypoint (zig zag pattern) before it went off for a long journey. Most autonomous UAV builder and owners simply launched their planes and go straight away on their journey to their next distant waypoint but for me i usually let it fly above my head first at least passed between 2 to 4 close range waypoint before it heads out for its long journey. Why do i need to do that? The first 3 to 4 waypoints after launching then loitering around over my head at closed range within L.O.S (Line Of Sight) range is called 'Pre-Check Waypoints'. You don't find much about the term 'Pre-Check Waypoints' online neither at drone/UAV community forum because not many people wanted to waste battery power, time and resources to let their flight models to such flight pattern. The 'Pre-Check Waypoints' is a procedure i came out of my own ideas based on my experienced flying my home DIY made UAV planes used as redundancy UAV health check to ensure the plane are safe enough to be complete departure away from the based after checking its flight parameters in the air.
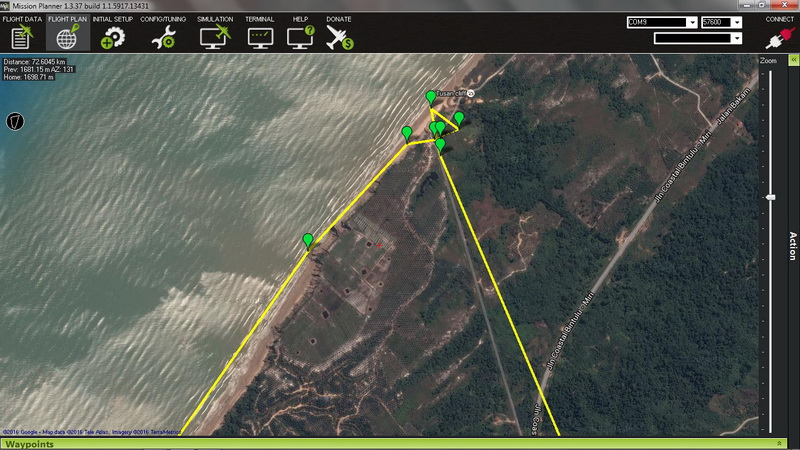
The 'Pre-check Waypoints' protocol
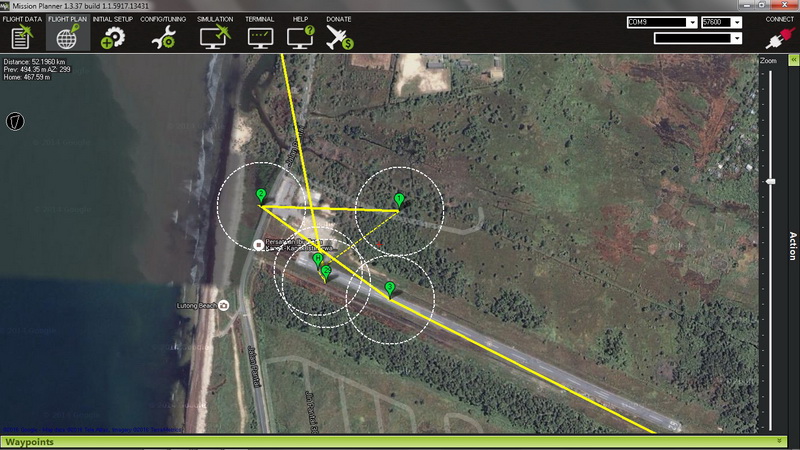
What does a 'Pre-check Waypoint' flight pattern do? Its actually a simple 2~4 waypoint or more performed at close proximity above the home base executed after launching the UAV platform. The waypoint loitering size usually around 70m radius between each waypoint visible enough for the operator/user/pilot to see line of sight and close enough for both radio contro l and radio telemetry frequency to connect with the UAV model. The waypoint pattern plotted random or zig zagged within visual range above the base usually having sharp angular or polygonal turning point where plane have to bank hard on each opposing waypoint. The reason such waypoint created before fully depart away from home base is to check if the UAV platform is 'healthy' or 'fit' enough to perform the mission by observing its flight characteristic, handling and check for any abnormalities as it fly above us, so i can decide if it safe enough to let it fly or push the abort mission button.
l and radio telemetry frequency to connect with the UAV model. The waypoint pattern plotted random or zig zagged within visual range above the base usually having sharp angular or polygonal turning point where plane have to bank hard on each opposing waypoint. The reason such waypoint created before fully depart away from home base is to check if the UAV platform is 'healthy' or 'fit' enough to perform the mission by observing its flight characteristic, handling and check for any abnormalities as it fly above us, so i can decide if it safe enough to let it fly or push the abort mission button.
Below are list of task of things to watch out once UAV launched in the air then started to loiter close by waypoints:
-
Does it has enough power to climb altitude? (Power + motor + GPS/Baro Altitude check)
-
Does it stall during sharp turn? (Stall prevention test + motor thrust + TECs check)
-
Does it accurately fly into assigned waypoint? (GPS lock performance check)
-
Is it stable during flight? (Servo + power health check)
-
Any warning or error on GCS (Ground Control Station)? (Flight controller parameter health check)
If all above passed though rough observation and monitoring via GCS then the UAV is good to go. As mentioned before for any autonomous platform regardless if its fixed wing, multirotor, single rotor (helicopter) or rover (ground based) i always sacrifice a bit of power and runtime doing a simple waypoint route before launching long distance autonomous mission so i could do a quick last minutes performance checklist. Normally most people will check their UAV platform status while its on the ground but not after launching it. Health status of UAV on the ground and in the air offer difference results because once its start to pump the power all onboard hardware goes 100% and that is the moment where critical failure started to show up. Normally once in the air my UAV have to passed these health checklist as listed below.
**Note i usually used android 3DR - TOWER and DROID PLANNER apps to monitor my ARDUPILOT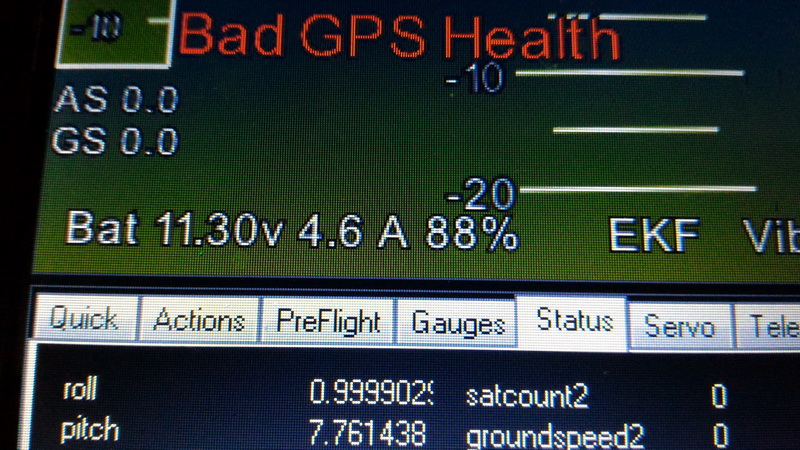 driven flight controller onboard fixed winged UAV.
driven flight controller onboard fixed winged UAV.
-
Monitoring GPS lock at least minimum 9 satellite or recommended with HDOP full 3D lock.
-
Ensure battery sensor are working properly with current/voltage calibrated at true value.
-
Radio controller and radio signal at high RSSI point.
-
Healthy compass status which required for multirotor (Critical) but optional for fixed wing.
-
Healthy status for other sensors such as accelerometer, gyro, airspeed sensor and other optional devices like lidar, proximity sensor, air speed sensor and etc.
-
Other non-measureable factor such as weather humidity, wind direction, current thermal strength and air traffic congestion.
Based on my experience despite having all green check list as shown above doesn't mean your UAV platform will have a guarantee zero risk flight throughout the mission, there are always about 20%~30% chances it will shown signs of impending failure a few seconds or minutes into 'operational' autonomous flights. On perfectly build UAV platform most failure comes due to fail to take time to calibrate, degraded hardware performance and fail to plan ahead into unexpected weather. Here are several true scenario happened to me which led to lost several of my UAV fixed wing and also multirotors despite they are 100% build and tuned perfectly from the start of their life span.

Scenario 1:
If you've been following my twitter for about half decades ago i did build fixed wing big FLY DREAM aka BIXLER which have same the same UAV as Drifter UAV setup that runs on APM MINI PRO, it was also consider the last plane that have both full FPV + UAV capable hardware with proven longer radio MAVLINK connection over 20km on 433Mhz due to its isolated telemetry antenna located at the rear tail. The plane have been through just 5  cycle of autonomous flight in just a month. The last flight was on windy Saturday morning with slightly more thermal than usual. On the ground the GPS, gyro, compass, RSSI indicator, servo, battery and other parameter was healthy as usual. Went into successful hand launch and made 4 way point closed proximity flight as 'Pre-check Waypoint' protocol so i could observe plane flight condition visually line of sight and on my GCS app via smartphone. During the first 3 waypoint flight it went ok but on the 4th waypoint the plane flew slightly 'crabby' or should i say drifted side swerving its tail pointed into head wind...but lousy judgment says it was ok to continue the flight so i ignore the windy condition on that day. Once its already exit the 'Pre-check waypoint' to the next waypoint to continue mission the plane started flying sideways like a crab for the rest of the flight when viewed via FPV goggle as it pointed its head towards the head wind and confirmed by compass heading onboard. FPV signal lost at 11km and last MAVLINK signal was at 20km when it suppose to do a U-turn home...i did waited for 1 hour for its returned but to no avail. My prediction was i guess it stalled somewhere in the ocean as it try to banked against the wind because my previous experience with BIXLER type plane actually not really good at recovering itself when its already started to stalled itself due to immense dihedral wing tip design. Lesson learned; do not over confident on your platform, bail out from the flight if it shows indication that it couldn't handle abnormal wind pattern. I should have bail out immediately when it shows signs of struggle on 4th waypoint. *Note that i did try to activate RTH mode on my GCS when my MAVLINK radio but didn't worked well.
cycle of autonomous flight in just a month. The last flight was on windy Saturday morning with slightly more thermal than usual. On the ground the GPS, gyro, compass, RSSI indicator, servo, battery and other parameter was healthy as usual. Went into successful hand launch and made 4 way point closed proximity flight as 'Pre-check Waypoint' protocol so i could observe plane flight condition visually line of sight and on my GCS app via smartphone. During the first 3 waypoint flight it went ok but on the 4th waypoint the plane flew slightly 'crabby' or should i say drifted side swerving its tail pointed into head wind...but lousy judgment says it was ok to continue the flight so i ignore the windy condition on that day. Once its already exit the 'Pre-check waypoint' to the next waypoint to continue mission the plane started flying sideways like a crab for the rest of the flight when viewed via FPV goggle as it pointed its head towards the head wind and confirmed by compass heading onboard. FPV signal lost at 11km and last MAVLINK signal was at 20km when it suppose to do a U-turn home...i did waited for 1 hour for its returned but to no avail. My prediction was i guess it stalled somewhere in the ocean as it try to banked against the wind because my previous experience with BIXLER type plane actually not really good at recovering itself when its already started to stalled itself due to immense dihedral wing tip design. Lesson learned; do not over confident on your platform, bail out from the flight if it shows indication that it couldn't handle abnormal wind pattern. I should have bail out immediately when it shows signs of struggle on 4th waypoint. *Note that i did try to activate RTH mode on my GCS when my MAVLINK radio but didn't worked well.
Scenario 2: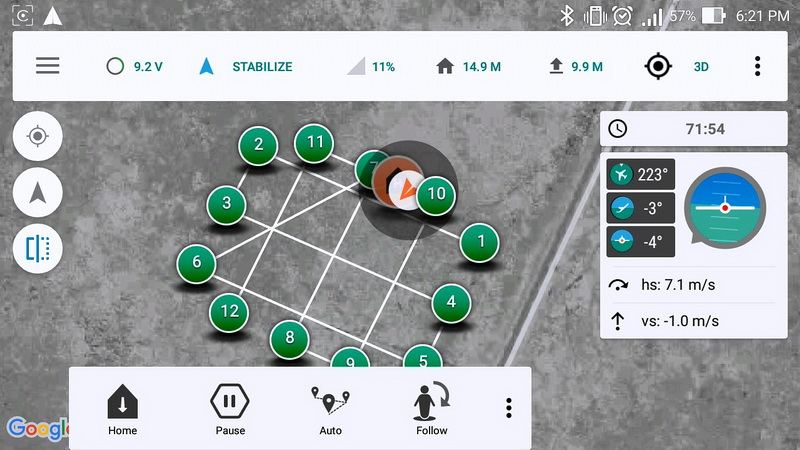
Its my 450 size 3DR APM quadcopter; Been through more than 50x cycle of successful flight most are FPV + aerial photography while 40% are autonomous waypoint flight. Usually its build for aerial photography and basic mapping works but on that fateful day during the first close proximity waypoint flight the current shown on FPV's OSD MAVLINK layout shows spike of unstable current consumption on as it passed second waypoint then followed with compass error reading. I ignore it thinking it was a temporary glitch out of 0.001% probability but i was wrong. On the 5th waypoint it flew away and never to return..even FPV video signal was lost at just 500m range. 1 year later when flying micro FPV racing quad around the beach with friends a fisher man sat near us and told us he caught a red and white rusty 4x prop drone in their net and gave to their young cousin to tinker around. It was about 3km from the base where i flew. Ouch!
Scenario 3:
Ironically this one happened during the early development of third unit Z-84 V3 which gone terribly wrong but manage to recover back safely. The Z-84 V3.0 was on its third day of autonomous test flight conducting grid style waypoint test, has the same basic components build like its predecessor the Z-84 V2.0. On ground test leaving it for about 30 minutes the GPS lock, compass, battery, servo and other hardware's/sensors worked well just like previous test day. But on third day; after launching the plane entering  the 3rd waypoint the GPS lock started to dip from 9 to 6 satellite lock. Again ignoring it was a temporary fluke. The flight expected to do a grid style waypoint test to 'stress test' the platform like i always did, however the GPS module started to deteriorate from 6 to almost 0 satellite after 15 minutes into the flight. When its hitting 0 satellite it automatically started to do loiter flight mode in circle as default fail safe procedure but unfortunately due to windy condition it got pushed sideways and started to drift off-set 30 meters every 20 seconds until it was flown outside 1km range which is at that time was outside my MAVLINK radio GCS range...the antenna was not configure well at that time because it was still at beta test build. The Z-84 GPS started to gain lock at random times but as it try to return home the flaw repeated itself again and again causing the plane to veered further beyond 3km. I had to chase the plane down the highway driving my car to locate the plane where about parallel to the direction of the wind and pointing my ground station antenna to get signal locked hoping some signs via GCS apps. It was 15 minutes worth of havoc trying to locate the plane in the air until the last 20 minutes i heard my GCS apps voiced that it has full GPS locked and on its way to return back to home base and it did flew back about 7 km away from where it suppose to. I drove back, waited for its arrival and manage to catch the signal back on my 9X + FrSky controller and landed manually with just 15% power to spare. Upon inspection my GPS module was overheating like it was baked inside an oven, after further investigation the current power supply that powered the GPS was faulty. The GPS module was replaced with different model from different vendor. Lesson learn; don't ignore even the smallest flaw in the air.
the 3rd waypoint the GPS lock started to dip from 9 to 6 satellite lock. Again ignoring it was a temporary fluke. The flight expected to do a grid style waypoint test to 'stress test' the platform like i always did, however the GPS module started to deteriorate from 6 to almost 0 satellite after 15 minutes into the flight. When its hitting 0 satellite it automatically started to do loiter flight mode in circle as default fail safe procedure but unfortunately due to windy condition it got pushed sideways and started to drift off-set 30 meters every 20 seconds until it was flown outside 1km range which is at that time was outside my MAVLINK radio GCS range...the antenna was not configure well at that time because it was still at beta test build. The Z-84 GPS started to gain lock at random times but as it try to return home the flaw repeated itself again and again causing the plane to veered further beyond 3km. I had to chase the plane down the highway driving my car to locate the plane where about parallel to the direction of the wind and pointing my ground station antenna to get signal locked hoping some signs via GCS apps. It was 15 minutes worth of havoc trying to locate the plane in the air until the last 20 minutes i heard my GCS apps voiced that it has full GPS locked and on its way to return back to home base and it did flew back about 7 km away from where it suppose to. I drove back, waited for its arrival and manage to catch the signal back on my 9X + FrSky controller and landed manually with just 15% power to spare. Upon inspection my GPS module was overheating like it was baked inside an oven, after further investigation the current power supply that powered the GPS was faulty. The GPS module was replaced with different model from different vendor. Lesson learn; don't ignore even the smallest flaw in the air.

Parameters to observe
Once its launched and fly in 'Pre-check Waypoint' pattern you immediately check some critical parameter you'll need to observe via 'Line Of Sight' (LOS) and also through your handheld monitoring devices or known as your GCS (Ground Control Station) eg: tethered tablet, smartphone or computer that run program such as Mission Planner, TOWER, Droid Planner or other compatible UAV apps that displayed all health telemetry.
Here are list of basic parameter need to observe after launching the UAV:
-
GPS locks accuracy.
The biggest factor that could stop me from continuing the mission is if the GPS lock became unstable both on the ground and in the air. On the ground if it took more than 5 minute to lock up from 7 to 9 satellite then its a 'No' go because suspected that something on board the platform causes RF interference nearby that delayed the lock efficiencies. A healthy GPS doesn't dips its satellite down more than 2 satellite for ever 30 seconds. A good GPS setup will have a constant and satellite "linear" lock than random dropouts. Same goes when it started to fly up in the air, the GPS satellite lock should gain more lock up to HDOP 3D status when operating in normal condition. On the ground its normal to get a 9 satellite lock and by the time its in the air it should gain more satellite lock due to no signal obstruction as its gets higher from ground surface. I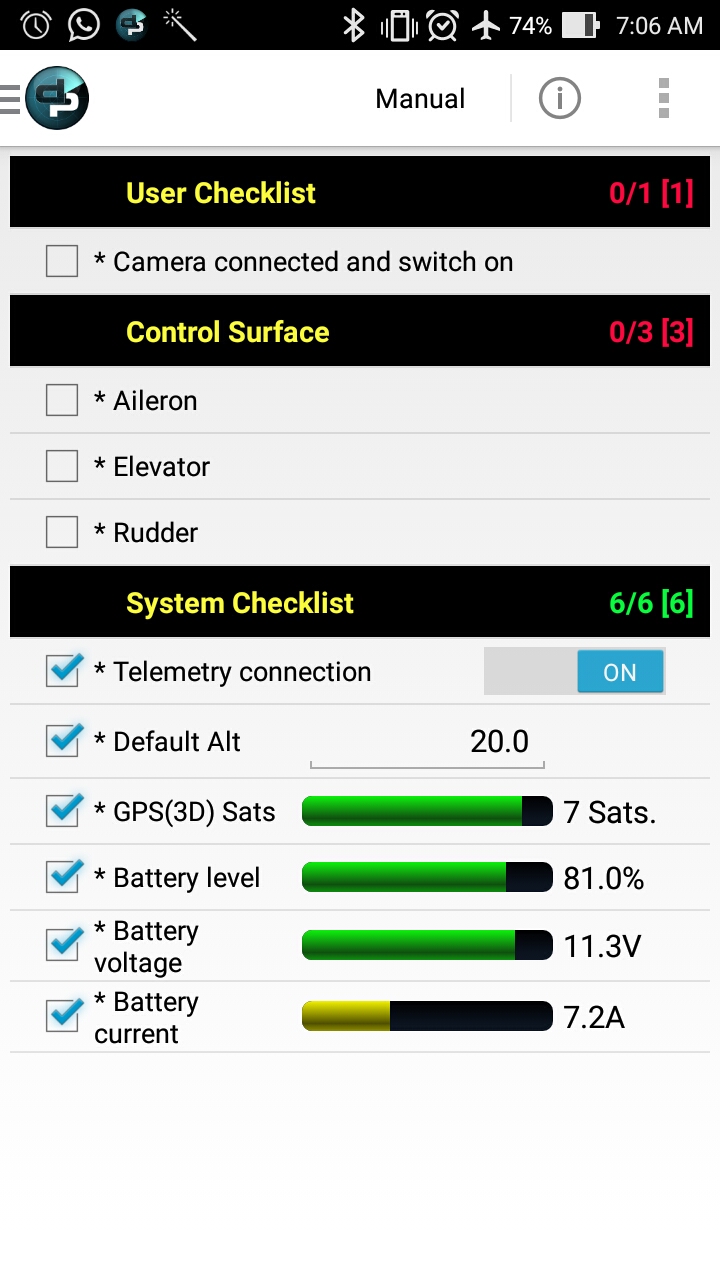 usually gets 9 lock on the ground and 12 locks once up in the air in 2 minutes time. During the 'Pre-check Waypoint' flight, monitor the GPS lock status make sure its went constant/linear accumulation of satellite and doesn't not 'abruptly' losses -2 or more satellite every 5~10 second in the air. Losing and gaining satellite 'abruptly' in non-linear fashion indicating an active RF interference nearby the GPS module or instability of power current supplying the GPS module. If the GPS module gain more satellite at abrupt rate going up (+) then its ok, but if its at 'abrupt' rate losing GPS at short interval going up and down then you must cancel your flight mission and troubleshoot the problem ASAP. These actually reflected the same happening as in 'Scenario 3' mentioned before.
usually gets 9 lock on the ground and 12 locks once up in the air in 2 minutes time. During the 'Pre-check Waypoint' flight, monitor the GPS lock status make sure its went constant/linear accumulation of satellite and doesn't not 'abruptly' losses -2 or more satellite every 5~10 second in the air. Losing and gaining satellite 'abruptly' in non-linear fashion indicating an active RF interference nearby the GPS module or instability of power current supplying the GPS module. If the GPS module gain more satellite at abrupt rate going up (+) then its ok, but if its at 'abrupt' rate losing GPS at short interval going up and down then you must cancel your flight mission and troubleshoot the problem ASAP. These actually reflected the same happening as in 'Scenario 3' mentioned before. -
Voltage and current consumption
Many people under estimated the symptom of voltage and current consumption in UAV platform. Without stable electric current the whole UAV hardware won't work properly; too much current will cause overheating... going less will cause "brownout". Unfortunately no body able to troubleshoot the problem because by the time the trouble happens the UAV platform already long gone probably crash in isolated places no longer transmit any GPS signal location via telemetry due to power failure. Which is why not many people able to report their case through online discussion forum because they no longer have the platform in hand. 60% problem happens because there are too many hardware hooked to the same power current resources to a single power regulator/BEC module rather than redundant unit. An early symptom of BEC problem during flight are servo start to twitching which can cause the plane to wobble during flight, GPS lock performance degrading or delayed lock, unstable current consumption (A) during flight when monitored via GCS apps such as TOWER, Droid Planner or in Mission Planner GUI and low radio RSSI on both control and telemetry unit. So if the plane flown in 'Pre-Check Waypoint' and there's sign of abnormal voltage and current in your GCS monitoring apps then you should abort the mission. -
Compass (Magnetometer)
Compass features is not very critical on plane but on multirotors like quad, hexa or octo compass is crucial component that helps to orientate flight heading. What's seems to be perfectly well calibrated compass on the ground doesn't means its all perfect when its in the air like what happened in ' Scenario 2' mentioned before. Compass sensor is highly affected when the hardware started to pump more electric current into the ESC and motor which create higher RF magnetic interference around the Compass component which is why most compass build are shielded using metallic wrapper or placed isolated higher above the platform on top of GPS mounting pole. So when you begin to fly let the platform fly for few minutes and monitor the health status of the compass before freely roam into distance. -
Servo
As your fixed winged UAV platform getting old and gone through many cycle of flight surface control servo that control the aileron, elevon, rudder and other mixed surface control usually will degrade overtime due to constant movement running from 40 minutes up to 90 minutes continuously per-session. Most of home build miniature fixed wing UAV's servo runs based on internal coreless brushed motor to move the servo horn then to fli ght control surfaces via push-rods. The 5~6V/200~700mA electric current transferred to the motor through touch and friction around the motor's commutator in order to move the servo gear then towards the servo horn. This action generate heat, spark and also friction which means the brushed contact started to go wear and tear. Sign of servo wear out is the surface control started to twitch a lot or vibrate on the ground and may cause the plane wobble or unintended gyrating when flying in the air...these can be observe visually and even felt when controlled manually. Do note that worn out servo can also have huge impact to nearby components for example; when the servo worn out it will begin to twitch and this generate more current (A) consumption. The active twitching also create RF interference aka magnetic spark due to brushed friction on the commutator causing much interference to nearby sensitive devices and sensor such as compass (magnetometer), cause reduce radio sensitivity on radio telemetry antenna (433Mhz) and will affect GPS lock operation especially on unshielded GPS components.....it happened on my short lived APM MINI PRO powered SONIC MODELL Micro Sky Hunter (to small and cramp to fit in everything).
ght control surfaces via push-rods. The 5~6V/200~700mA electric current transferred to the motor through touch and friction around the motor's commutator in order to move the servo gear then towards the servo horn. This action generate heat, spark and also friction which means the brushed contact started to go wear and tear. Sign of servo wear out is the surface control started to twitch a lot or vibrate on the ground and may cause the plane wobble or unintended gyrating when flying in the air...these can be observe visually and even felt when controlled manually. Do note that worn out servo can also have huge impact to nearby components for example; when the servo worn out it will begin to twitch and this generate more current (A) consumption. The active twitching also create RF interference aka magnetic spark due to brushed friction on the commutator causing much interference to nearby sensitive devices and sensor such as compass (magnetometer), cause reduce radio sensitivity on radio telemetry antenna (433Mhz) and will affect GPS lock operation especially on unshielded GPS components.....it happened on my short lived APM MINI PRO powered SONIC MODELL Micro Sky Hunter (to small and cramp to fit in everything).
-
ESC and main motor.
Like servos the ESC and brushless motor also have its own life span which subject to wear and tear but not as drastic as servo itself but depends how much strain both hardware have been through. ESC's performance degrade because of MOSFET chip started to burned out due to over-amp-ing and heat exposure. On brushless motor wear and tear happens because of commutator wires started to 'cooked' and magnet around the motor bell started to de-magnetize due to constant ope rating heat due to over throttling, high voltage pump aka high kHz resolution. When the commutator wires shows baked like feature and magnet around the motor bell de-magnetized it will gradually losses some torque and rpm render it inefficient to rotate propellers to generate thrust. My high torque FPV P-51D Mustang drone share the same issues where it started to have 'choked' throttle issues up in the air and was immediately replaced. It had already has hundred hours cycle of over clouds FPV flights.
rating heat due to over throttling, high voltage pump aka high kHz resolution. When the commutator wires shows baked like feature and magnet around the motor bell de-magnetized it will gradually losses some torque and rpm render it inefficient to rotate propellers to generate thrust. My high torque FPV P-51D Mustang drone share the same issues where it started to have 'choked' throttle issues up in the air and was immediately replaced. It had already has hundred hours cycle of over clouds FPV flights. -
Gyro
Of course these are common sense thing to know before you start flying. Calibrate and steadily seated your platform to allow it to calibrate before its ready to arm and fly. But sometimes during flight it may go haywire too. Fortunately gyro and accelerometer sensors problem seldom an issue unless you're living in early year 2010 where hardware used to be sub par quality. MultiWii anyone? -
Radio/Data telemetry
For UAV operation radio controller link useful for 'hand to stick ' manual launching and landing, while radio telemetry unit used for receiving and transmitting data telemetry (GCS station) for monitoring data on first few minutes of departures and last minutes arrival time. The radio connection strength are monitor via RSSI. If the RSSI strength is lower than usual the its time to bail out and troubleshoot the problem since it could be an RF leak/interference onboard or incompetent power supply which will affect other components too.
' manual launching and landing, while radio telemetry unit used for receiving and transmitting data telemetry (GCS station) for monitoring data on first few minutes of departures and last minutes arrival time. The radio connection strength are monitor via RSSI. If the RSSI strength is lower than usual the its time to bail out and troubleshoot the problem since it could be an RF leak/interference onboard or incompetent power supply which will affect other components too. -
Ecological factor
Regardless how good your UAV platform performed with good track record flying over hundred hours of mission flight roster yet never underestimate the power of mother nature. There's a good reason why to keep an eye on how your UAV plane react to the wind and its surrounding during its 'Pre-check waypoint' phase. If it couldn't handle the windy condition, bad visibility due to fog or too much thermal effect on hot weather then you'll have time to decide if you need to stop the autonomous mission for safety reason or vice versa Yes i learned the hard way losing my plane in 'Scenario 1'.
So above are my basic list of atributes to monitor during the 'Pre-Check Waypoints' flight for all my fixed wing UAV and also applicable for multirotors. Sometimes the attributes to look out can be more than what i've listed above depends on how complex a UAV features and function was build into it for example camera gimbal , Lidar sensor, deployment servos (cargo UAV), airspeed sensor and etc; because of all this bulk feature there are reason why i prefer keep my UAV build with more simpler features and function so there will be less thing to worry about (less components to break down) which makes its easy to narrow down troubleshooting the problem due to less parts onboard. Simplicity always the best!..or should i say "less is more".

List of my active UAVs (autonomous mission flight)
Below are list of currently active fixed wing that uses that above flight pattern protocol for further reading and reference:
Summary
The 'Pre-Check Flight' have saved me from 'mission gone wrong' by helping me do detect hidden symptom, ensuring safer and confident mission flight. This protocol should have been part of fundamental knowledge of handling any UAV platform to ensure that all flight parameters are fully check, monitored and confirm the health parameter are within acceptable range/level while UAV flying close proximity in the air before letting the UAV drone to continue on long range autonomous mission. So before you launched your UAV platform into unknown territory it is best to do a simple close proximity flight (Pre-check Waypoint) so you can observe and monitor its health parameter before its cleared for long autonomous journey.
** PS: Before we end this article; oh btw remember the last article?...yeah got the C-FLY DREAM drone! Coming soon shortly on my next review. hehehe!
